FMCW 雷达系统概述
在这一节中,我们将概述 AWR1243、AWR1443 和 AWR1642 系列的 TI FMCW 雷达传感器及其应用。它们均属于 AWR1x 系列单芯片毫米波雷达传感器,专为高级驾驶辅助系统(ADAS)应用而设计。
这些传感器能够在 76-81 GHz 频段内运行,并支持高达 4 GHz 的连续 CHIRP 带宽。它们基于 TI 低功耗 45 纳米 RF CMOS 技术,在极小的封装中实现了前所未有的集成度。
关键应用
这些设备支持以下应用:
- 自适应巡航控制(ACC)
- 自动紧急刹车
- 盲点检测
- 行人和骑行者保护
- 碰撞避免
- 城市驾驶与自动化高速公路驾驶
系统架构
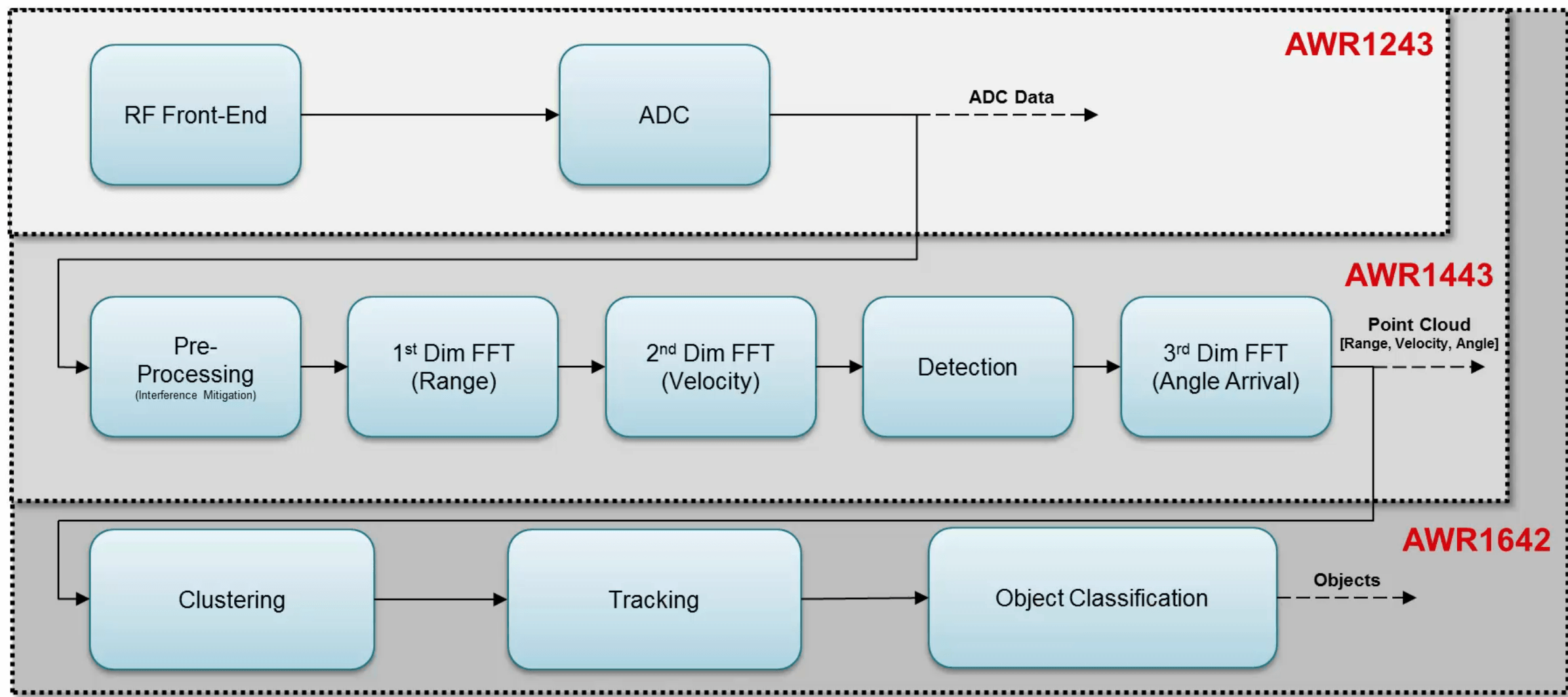
这些雷达传感器通过集成模拟和数字组件,如多个发射和接收链路、PLL、A2D 转换器、ARM Cortex-R4F MCU 或 C674x DSP、FFT 加速器、内存和各种 I/O 接口,提供一站式解决方案。
这些设备还具有持续的自我监控和 RF 与模拟功能的校准能力,采用内置的 ARM R4F 无线电处理子系统,负责前端配置、控制和校准。
硬件加速器与处理能力
AWR1443 配备了硬件加速器来进行 FFT 计算和基于连续虚警率(CFAR)的检测算法,而 AWR1642 提供了全功能的 C674x 高性能 DSP,能够运行 FMCW 信号处理和高级算法(如聚类、跟踪和物体分类)。
设备示意与应用拓扑
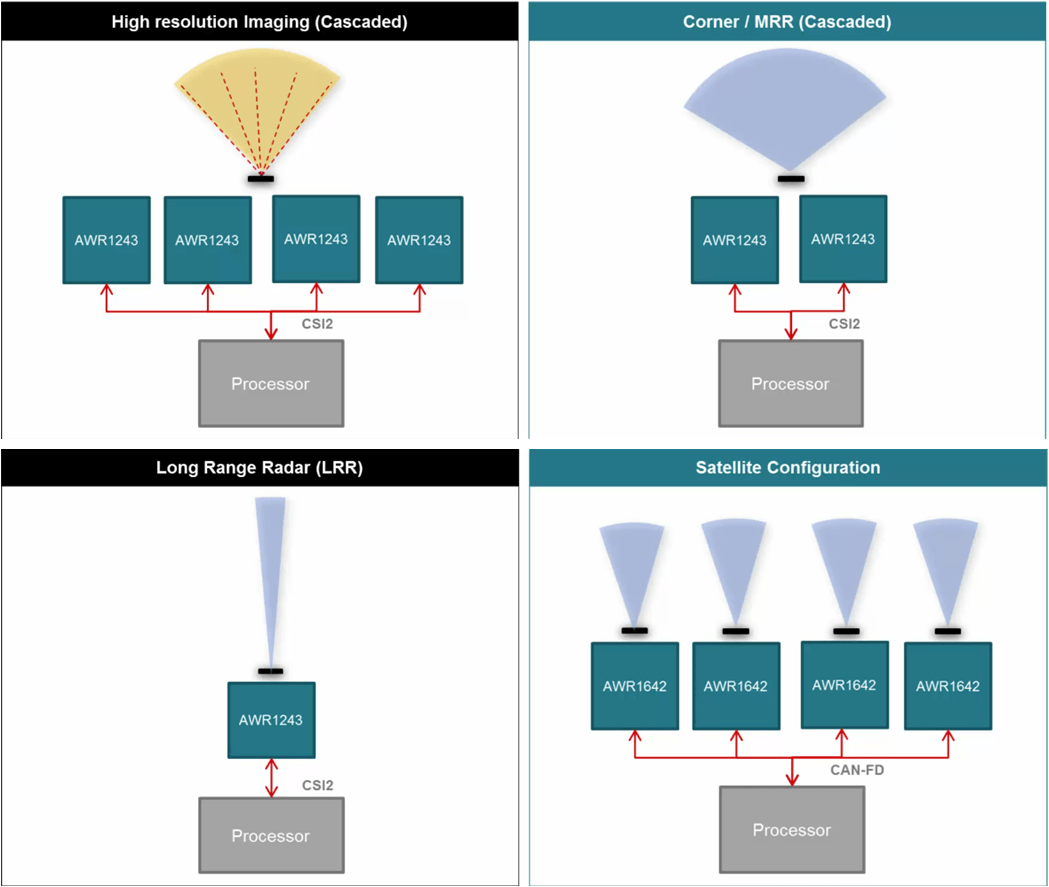
在自动驾驶系统中,这些雷达传感器可根据不同的应用需求进行级联配置:
- 高分辨率成像(级联配置):通过级联多个 AWR1243 设备,可以提供更高的角分辨率。
- 盲点检测:使用 AWR1243 配置进行中短距离的雷达应用。
- 长距离雷达(LRR):通过单个 AWR1243 实现长距离雷达应用。
- 卫星配置:多个 AWR1642 设备用于围绕环境的感知。
这些传感器通过 CSI2 或 CAN-FD 接口与外部处理器连接,处理来自传感器的原始数据,进行 FMCW 信号处理并控制雷达传感器。
AWR1x 雷达设备架构
本节将介绍 AWR1x 系列设备的结构,重点分析各个功能模块。AWR1x 系列包括 AWR1243、AWR1443 和 AWR1642 三款设备,均为单芯片毫米波雷达传感器,广泛应用于高级驾驶辅助系统(ADAS)。这些设备可在 76 至 81 GHz 频段内工作,支持最大 4 GHz 连续 CHIRP 带宽。
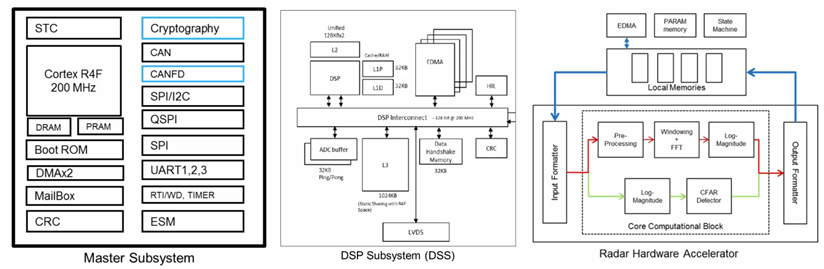
AWR1x 系列设备的架构主要可以分为以下几个部分:
- 射频和模拟子系统:包括合成器(Synth)、功率放大器(PA)、低噪声放大器(LNA)、混频器(Mixer)、中频(IF)和模拟数字转换器(ADC)。
- 雷达子系统:负责雷达信号的处理和检测。
- 主控子系统:包括处理和控制功能,AWR1642 还包含 DSP 子系统。
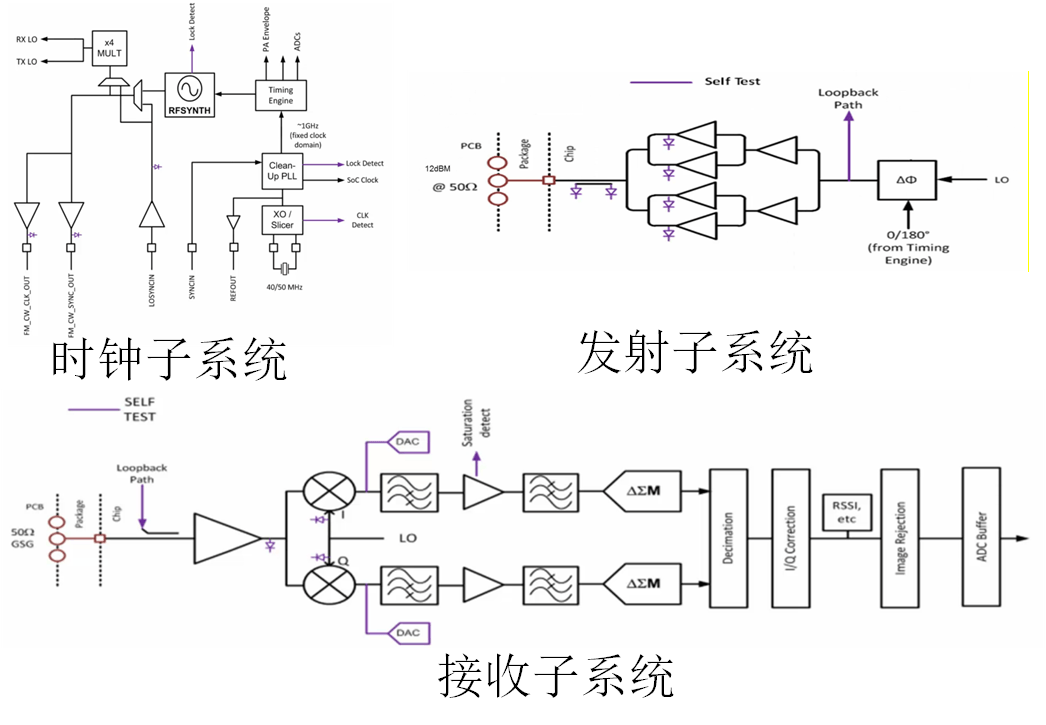
1)时钟子系统
时钟子系统生成 76 至 81 GHz 频率信号,输入频率为 40 MHz 晶体。该子系统包括内置的振荡器、清理 PLL 和 RF 合成器。
RF 合成器的输出通过 4x 倍频器生成所需的 76 至 81 GHz 频段频率,RF 合成器的输出由定时引擎(Timing Engine)调制,生成所需的波形,确保雷达的有效工作。
2)发射子系统
发射子系统包括最多 3 个并行发射链,每个链具有独立的相位和幅度控制。最大支持两个发射链同时工作,三链可以在时分复用的模式下工作。
设备还支持 MIMO 雷达的二进制相位调制,以及干扰抑制功能。
3)接收子系统
接收子系统包括四个并行接收通道,每个接收通道包括 LNA、混频器、IF 滤波、A2D 转换和抽取。
接收子系统采用复合基带架构,支持四个接收通道同时工作,并为每个接收通道提供 I/Q 输出。
4)功能拓扑结构
设备可以通过级联方式(cascading)扩展雷达的分辨率。例如,通过将多个 AWR1243 设备级联,能够提供更高的角分辨率。
这种拓扑结构对于高分辨率成像、盲点检测和近距警告等应用非常有用。
5)自检和调试
AWR1x 系列设备支持自检和调试功能,确保在运行时的可靠性和准确性。设备的自检路径包括时钟、发射和接收子系统的检测,能够快速发现潜在问题。
雷达子系统与硬件加速器
本节我们将重点介绍 AWR1x 系列设备中的雷达子系统和硬件加速器。
1)雷达子系统
雷达子系统包括一个专用的 ARM Cortex-R4F 微控制器,主频为 200 MHz,用于执行自校准、监控和测试功能。该微控制器由 TI 预编程,并不供用户应用程序使用。
用户应用程序无法直接访问雷达子系统。主控系统通过定义良好的 API 消息与雷达子系统进行通信,这些消息通过硬件邮箱传递,接口也被称为 mmWaveLink。TI 的 mmWave SDK 包含 mmWaveLink API。
2)主控子系统
主控子系统包括一个 ARM Cortex-R4F 处理器,运行用户应用程序代码。该处理器负责设备的整体操作,包括雷达控制、雷达信号处理、硬件加速器(或 DSP)的辅助处理和外部接口。
该子系统还包括多个外部接口,如 QSPI(可用于从串行闪存下载客户代码)、CAN(用于与 CAN 总线通信)、SPI/I2C(用于电源管理 IC 或控制)等。
3)DSP 子系统(仅限 AWR1642)
DSP 子系统仅在 AWR1642 设备中可用,包含 TI 高性能的 C674x DSP,用于 FMCW 信号处理,包括 FFT 和目标检测。该 DSP 还可执行更复杂的雷达信号处理,如聚类、跟踪和目标分类。
4)雷达硬件加速器(仅限 AWR1443)
雷达硬件加速器仅在 AWR1443 设备中提供,它能够将 FMCW 雷达信号处理中的一些常用计算任务从主处理器卸载。雷达信号处理需要使用 FFT 和对数幅度计算,以获得跨距离、速度和角度的雷达图像。
硬件加速器包含两个功能部分:一个用于 FFT 和相关的预处理和对数幅度操作;另一个用于 CFAR(常数虚警率)检测算法。
数据的传输使用 TI 的 EDMA(增强型直接内存访问控制器)。
如图所示,雷达硬件加速器不仅提升了处理效率,还确保了信号处理过程中的计算性能,帮助减轻主处理器的负担。
TI 雷达设备启动模式
1)启动模式概述
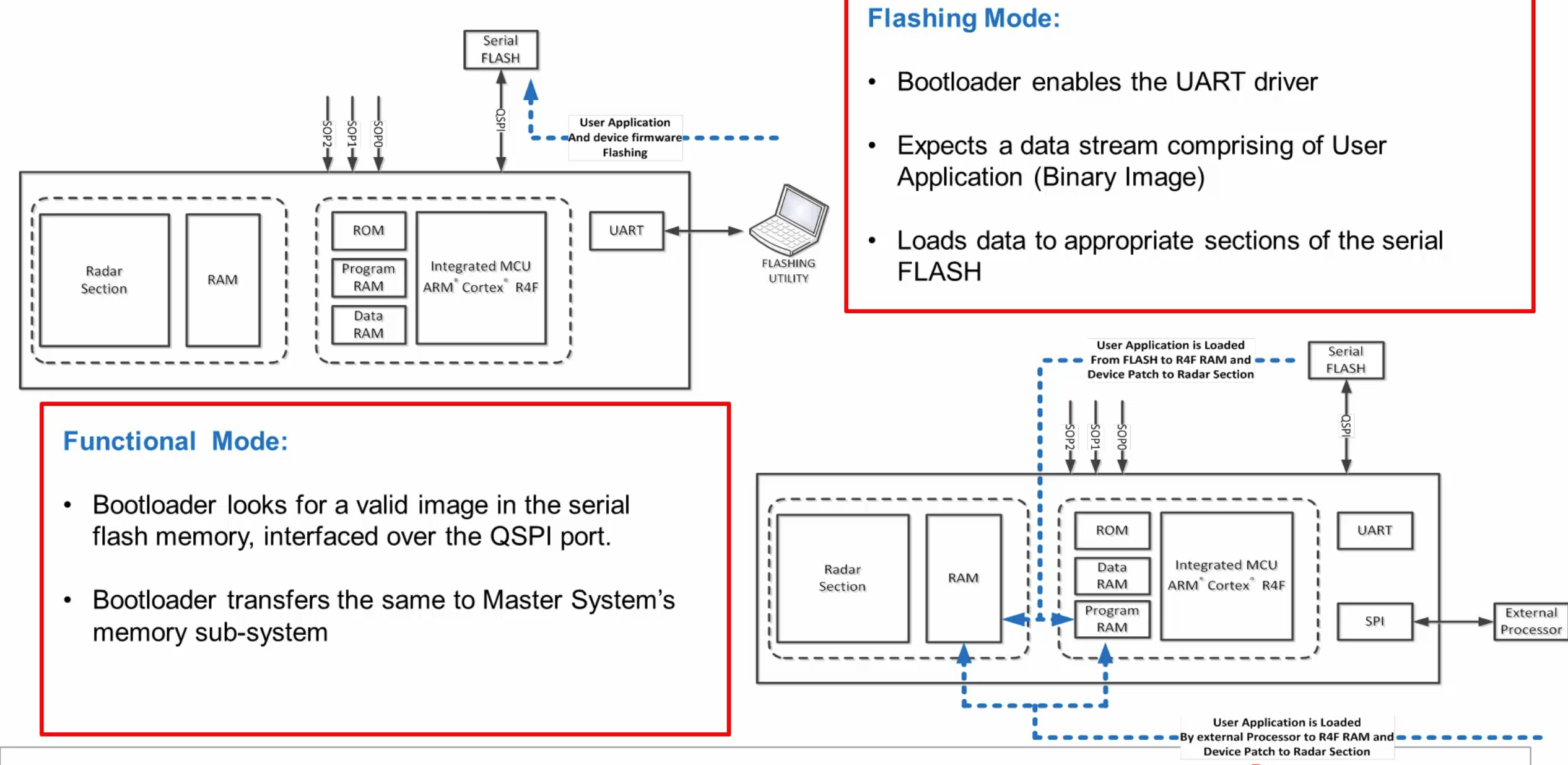
TI 的 mmWave 雷达设备支持两种启动模式:闪存模式和功能模式。选择所需的启动模式是通过配置设备的 Sense On Power(SOP)引脚来完成的,具体操作请参考设备的数据手册。
2)闪存模式
闪存模式用于将程序的二进制镜像存储到 QSPI 串行闪存中。当启用此模式时,引导加载程序会启用 UART 驱动程序,并期待接收包含应用程序二进制镜像的数据流。在接收到有效的应用程序二进制镜像后,引导加载程序会将其存储到串行闪存的相应部分。
该模式通常用于软件开发过程中,进行应用程序二进制文件的更新。
3)功能模式
功能模式(或部署模式)用于从 QSPI 闪存启动设备,使用之前存储的应用程序二进制文件。在此模式下,引导加载程序会查找 QSPI 闪存中的有效应用程序镜像。当找到有效镜像时,引导加载程序会将该镜像复制到主系统的内存中,从而启动引导过程。此模式下,设备能够从串行闪存中自主启动。
简而言之,闪存模式用于将应用程序二进制镜像写入闪存,而功能模式则用于从已存储的镜像启动设备。