线性调频脉冲(chirp)
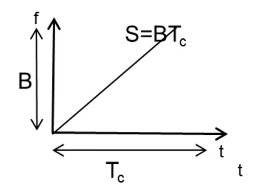
chirp 是一种频率随时间线性增加的正弦波。信号从初始频率 \(f_c\) 开始,逐渐增大到最终频率 \(f_c + B\),其中 \(B\) 是信号的带宽。这种类型的脉冲通常用于雷达系统中。
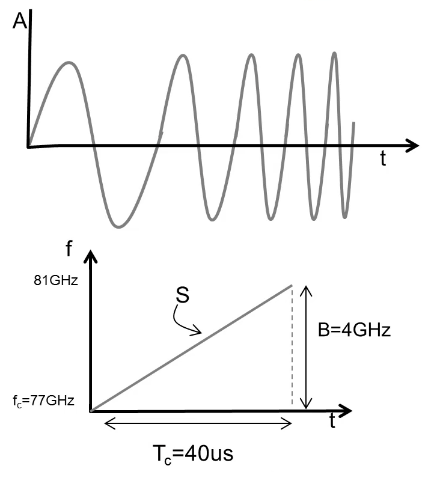
振幅-时间图(A-t 图)展示了线性调频脉冲如何从初始频率 \(f_c\) 开始,然后随着时间的推移,频率逐步增大,最终达到 \(f_c + B\)。
在频率-时间图(f-t 图)中,线性调频脉冲表现为一条具有固定斜率 \(S\) 的直线。信号的起始频率为 77GHz,带宽为 4GHz,最终频率为 81GHz,持续时间为 40 微秒,对应的斜率为 100MHz/微秒。
这种脉冲广泛应用于 FMCW 雷达系统中,能够通过频率变化来测量目标的距离和速度。
1TX-1RX FMCW雷达
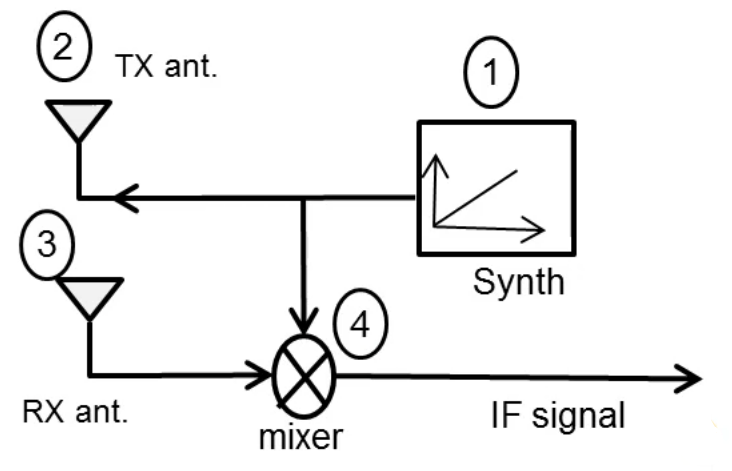
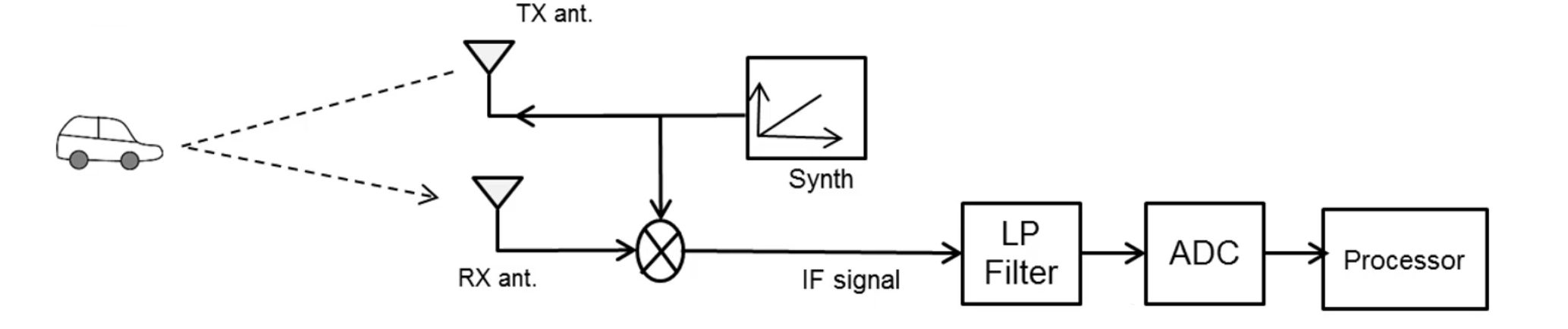
现在我们已经了解了线性调频脉冲的基本概念,接下来我们可以探讨 FMCW 雷达的工作原理。上图展示了一个简化的 FMCW 雷达框图,包含了 TX 天线和 RX 天线。雷达工作流程如下:合成器生成一个线性调频脉冲,通过 TX 天线发射出去。该脉冲反射回物体并被 RX 天线接收。接收到的 RX 信号与 TX 信号在混频器中混合,生成中频(IF)信号。
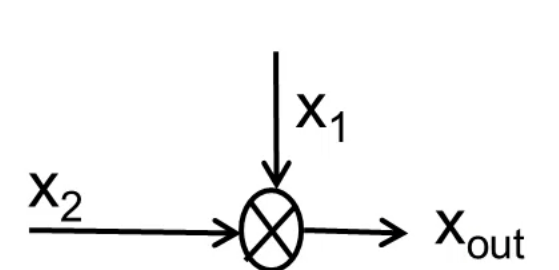
接下来,我们需要了解混频器的基本工作原理。混频器有两个输入端和一个输出端。如果两个正弦波信号输入到混频器,输出将是一个新的正弦波,且具有以下两个特性:
1. 输出信号的瞬时频率等于两个输入信号频率之差。即便输入信号的频率随时间变化,输出信号的频率在任何时刻都等于输入频率的差。
2. 输出信号的起始相位等于两个输入信号起始相位的差。以下方程中说明了这一点,其中 \(x_1\) 和 \(x_2\) 是输入信号,\(x_{out}\) 是输出。
$$ x_1 = \sin(\omega_1 t + \phi_1) $$
$$ x_2 = \sin(\omega_2 t + \phi_2) $$
$$ x_{out} = \sin[(\omega_1 – \omega_2) t + (\phi_1 – \phi_2)] $$
这些方程表示输出信号的频率为 \(\omega_1 – \omega_2\),相位为 \(\phi_1 – \phi_2\)。
通过分析 f-t 图可以更直观地理解混频器的工作原理。图中展示了 TX chirp 和 RX chirp 的信号,RX 信号是 TX 信号的时延复制。
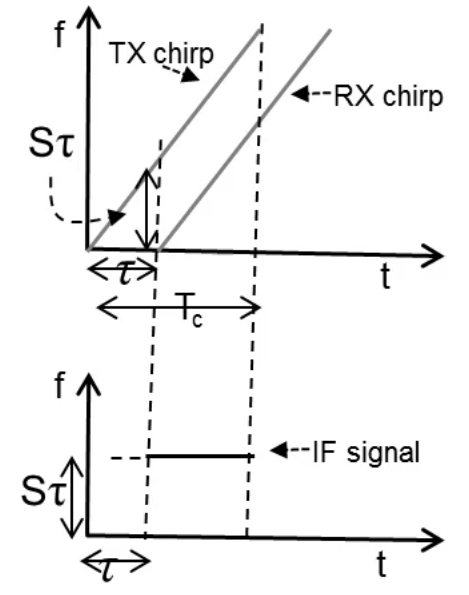
假设雷达前方只有一个物体,因此只有一个 RX chirp 信号。混频器的输出频率等于两个输入信号的频率差。为了生成中频(IF)信号的 f-t 图,只需要将这两条线相减。两条线之间的固定距离由 chirp 的斜率 \(S\) 和往返时延 \(\tau\) 给出。
因此,雷达前方的物体会产生一个频率为 \(S \cdot \tau\) 的 IF 信号。往返时延 \(\tau\) 还可以表示为物体与雷达之间距离的两倍除以光速。最终,得到的频率为 \(S \cdot \frac{2d}{c}\),其中 \(d\) 是物体到雷达的距离,\(c\) 是光速。
需要注意的是,IF 信号仅在接收到反射信号后才有效。因此,如果你使用 ADC 数字化该信号,需要确保只采集 \(\tau\) 时间延迟后直到 TX 信号结束的样本。
往返时延 \(\tau\) 通常是总 chirp 时间的一个小数。例如,对于最大探测距离为 300 米的雷达和 40 微秒的 chirp 时间\(T_c\),\(\tau/T_c\) 的比值大约为 5%。
傅里叶变换题外话
有关傅里叶变换数理知识见此处傅里叶变换将时域信号映射到频域。理想情况下,时域中的两个不同音调应在频域产生两条峰。但当观测窗口较短时,两个频率彼此太近,频谱主瓣会重叠,难以分辨;将观测窗口从 \(T\) 增加到 \(2T\) 后,主瓣变窄,两个峰被解析出来。
观测窗口:T(差 0.5 个周期 → 频域未解析)
由于窗口较短,谱主瓣宽,两个频率分量的主瓣重叠,难以分辨为两峰。
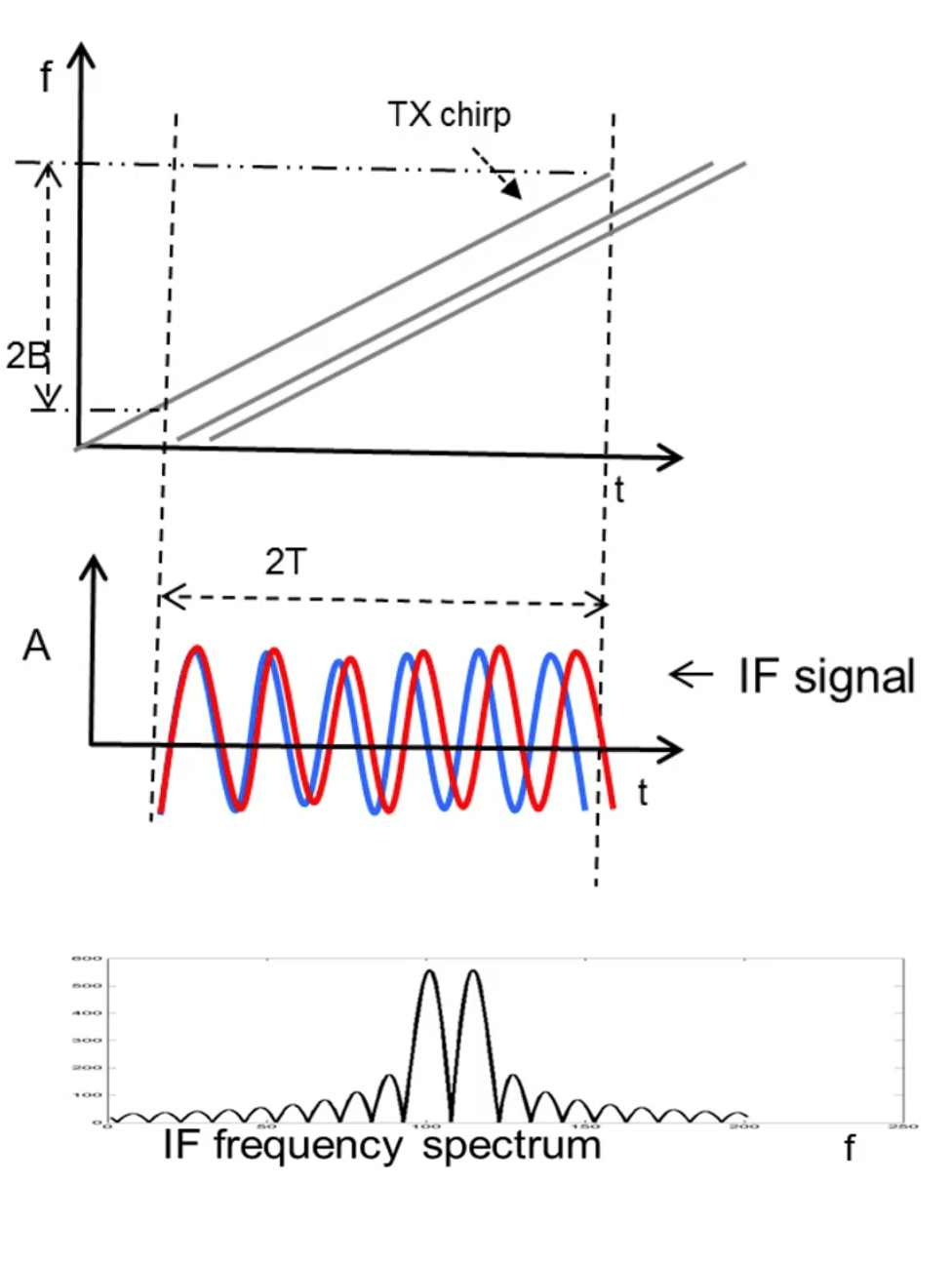
观测窗口:2T(差 1 个周期 → 频域可解析)
窗口翻倍后,谱主瓣变窄,两个峰被清楚地区分出来。一般地,频率分辨率约为 \(\Delta f \approx 1/T\)。
小结:观测期越长 → 频谱分辨率越好。在一个观测窗口 \(T\) 内,能分开的最小频率间隔约为 \(1/T\) 赫兹。
多目标回波
注:IF 音调频率 \(f_{\text{IF}} = S\cdot \tau \propto d\),其中斜率 \(S\) 为 chirp 斜率,\(\tau=2d/c\) 为往返时延。
- 多目标 ⇒ 多回波:不同距离带来不同 \(\tau\)。
- IF 中出现多条音调:\(f_{\text{IF}}=S\cdot\tau\),低频对应近目标,高频对应远目标。
- FFT 后是多峰频谱:每个峰对应一个目标;峰的位置与目标距离成正比。
- 分辨率:采样时间越长(观测窗越大),频率分辨率越好,更易区分近距离的多个目标。
范围分辨率(Range Resolution)
例子:前方有两个目标 ⇒ 接收端得到两条延迟不同的回波 chirp。混频后 IF 信号是两条频率非常接近的正弦波, 它们在频谱上可能挤成一个峰。
本示例展示了如何通过增加雷达信号的观测窗口来提高范围分辨率。上侧图为时域信号(IF信号),频率分辨率较差;下侧为频谱图,两个目标产生的回波信号因为频率接近,导致频谱上仅显示一个峰。
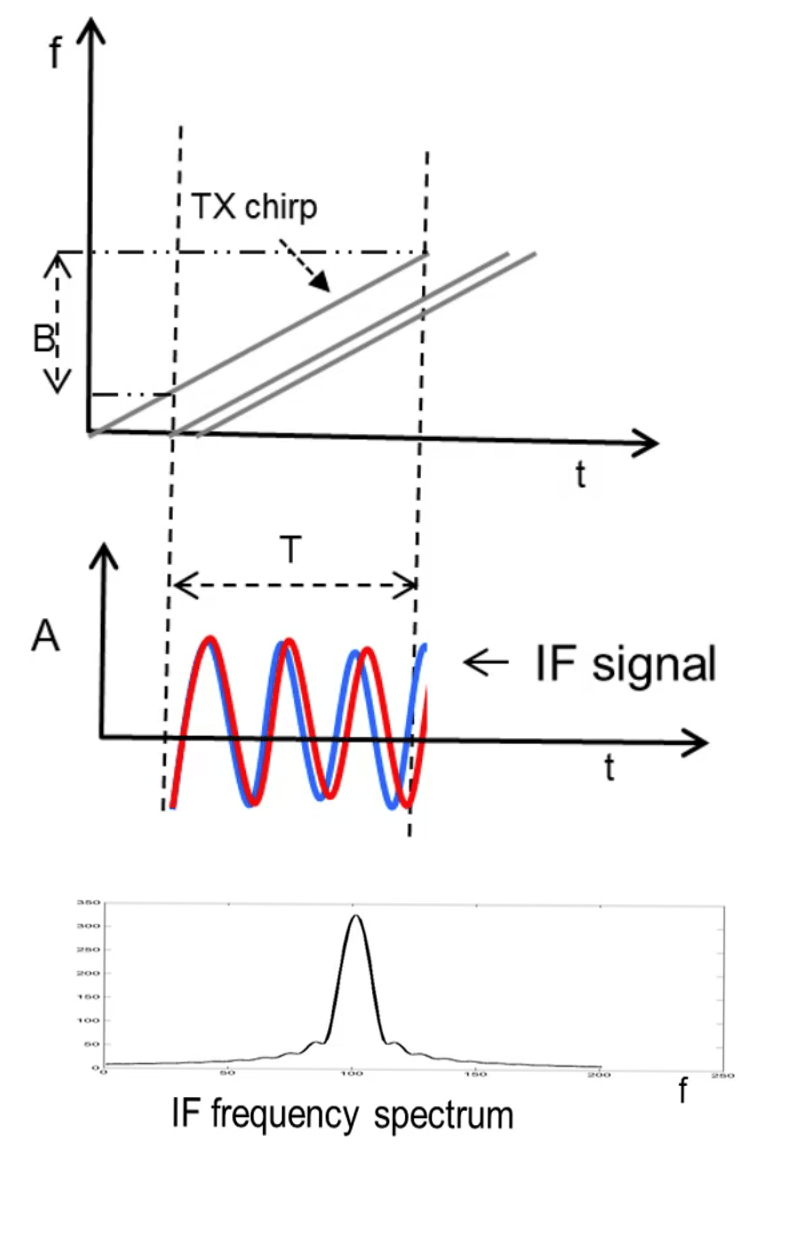
在这个例子中,我们有两个物体分别反射回雷达的线性调频脉冲(chirp)。对应的 IF 信号的振幅-时间图(A-t 图)展示了两个正弦波。但这两个正弦波的频率如此接近,以至于它们在频谱中表现为一个峰。
问题是如何改进雷达的距离分辨率,使得这两个物体能够被分辨出来。
从傅里叶变换的回顾中,我们得出一个解决方法:通过增加 IF 信号的观察窗口长度来解决这个问题。通过延长 chirp 信号的持续时间,IF 信号的持续时间也会延长,这样就能够在频域中分辨出两个峰。
延长 IF 信号的持续时间会直接导致 chirp 的带宽增大。根据傅里叶变换的原理,延长观察窗口可以使信号频谱中的主瓣变窄,从而让频率分量之间的差异更加明显。
关键启示
增大 chirp 信号的带宽与更好的距离分辨率直接相关。因此,更大的带宽 = 更好的分辨率。
总结
通过增加观察窗口(延长 chirp 持续时间),雷达能够更好地分辨距离接近的物体。增加 IF 信号的持续时间不仅提高了频率分辨率,还通过增大带宽来改善距离分辨率。
距离分辨率公式推导
以下公式推导展示了如何通过调整观测时间和带宽来提高雷达的距离分辨率。
$$ \Delta f = \frac{S \cdot 2 \Delta d}{c} $$
$$ \Delta f > \frac{1}{T_c} $$
$$ \frac{S \cdot 2 \Delta d}{c} > \frac{1}{T_c} $$
$$ \Delta d > \frac{c}{2 S T_c} \quad \Rightarrow \quad \Delta d > \frac{c}{2 B} $$
比较 Chirp A 和 Chirp B 的距离分辨率
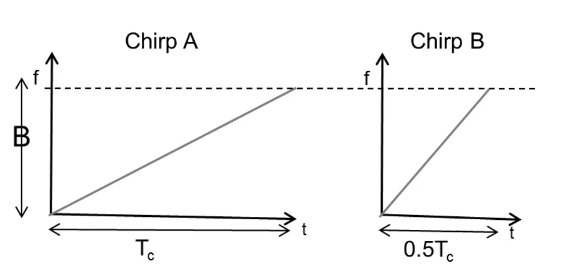
在此,我们有两个 chirp:Chirp A 和 Chirp B。Chirp A 的持续时间是 Chirp B 的两倍,但它们的带宽相同。哪一个 chirp 提供更好的距离分辨率呢?
如果从公式上来看,两者的带宽相同(\(B\)),因此根据之前推导的公式,\(c / 2B\),它们应该具有相同的距离分辨率。
然而,Chirp A 的持续时间更长,因此观察窗口更长,这意味着 Chirp A 可以提供更长时间的 IF 信号采样。从傅里叶变换的角度来看,Chirp A 应该能提供更好的分辨率。
这看起来像是一个矛盾,因为 Chirp A 和 Chirp B 的带宽相同,但 Chirp A 有一个更长的时间窗口。为了解决这个矛盾,考虑到实际情况:雷达的 IF 信号通常会被数字化处理。信号通过低通滤波器过滤,然后通过 ADC 采样,再送入处理器(如 DSP)。
在数字化的过程中,ADC 的采样率决定了信号能够提供的最大频率。为了能够捕捉最大范围内的目标,我们需要调整低通滤波器的截止频率以及 ADC 的采样率。
假设雷达的最大探测距离为 \(d_{max}\),那么最大 IF 信号频率将为 \(S \cdot 2d_{max} / c\)。因此,IF 信号的带宽也将从零到这个最大频率,意味着低通滤波器的截止频率必须超过最大 IF 频率,ADC 的采样率也应足够高。
因此,最大 ADC 采样率限制了雷达的最大探测距离。可以通过调节斜率和最大距离来权衡。通常情况下,对于更大的探测距离,雷达会采用较小的斜率。
总结:尽管 Chirp A 和 Chirp B 的带宽相同,它们的距离分辨率在理论上相同。但由于 Chirp A 的持续时间更长,它的观察窗口更大,提供了更高的分辨率。
FMCW 雷达工作原理
这是一个 FMCW 雷达的框图,包含了单个发射和接收天线。我们将讨论估算目标距离的过程:
- 合成器(Synth)生成一个 chirp 信号。
- 该 chirp 通过发射天线(TX Antenna)发射出去,并被多个物体反射。
- 接收天线(RX Antenna)接收到的信号与发射信号混合,产生中频(IF)信号。
- IF 信号包含多个音调,每个音调的频率与相应目标的距离成正比。
- IF 信号经过低通滤波(LP Filter)并数字化(ADC)。
- 数字化后的数据送入处理器,执行傅里叶变换(FFT)。
- FFT 结果中的峰值位置直接对应目标的距离。
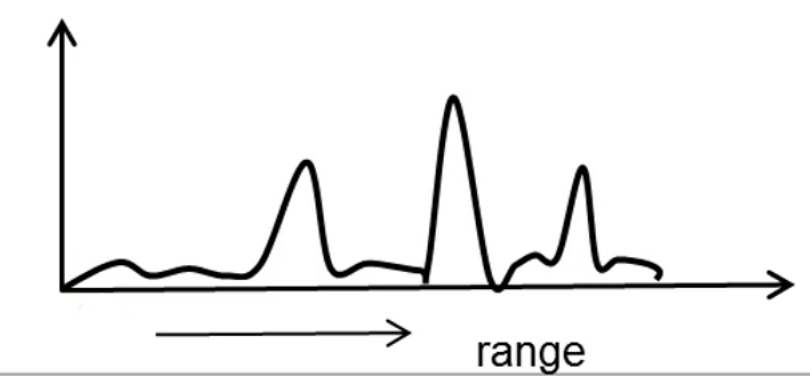
FFT 结果中的频谱反映了不同目标的距离。在这里,横坐标是范围(range),而不是 IF 频率。这是因为我们已知 IF 频率与距离是成正比的。
在 FMCW 雷达文献中,通常将这个过程称为“范围 FFT”,因为它能够解析目标的距离。
RF 带宽与 IF 带宽的关系
当我们讨论 FMCW 雷达时,通常有两个重要的带宽参数:RF 带宽和 IF 带宽。我们需要清楚地区分这两者:
- RF 带宽: RF 带宽是由 chirp 信号所跨越的频率带宽,直接影响雷达的距离分辨率。
- IF 带宽: IF 带宽影响雷达的最大探测距离和速度,通常较小。
更大的 Chirp 带宽能够提供更好的距离分辨率,而更大的 IF 带宽则能够使 chirp 变得更快,进而提供更远的最大探测距离。
评论