FMCW 雷达的 2D-FFT 处理流程
在这节中,我们回顾了使用 FMCW 雷达进行目标距离和速度估算的信号处理流程。特别是,雷达通过执行两个 FFT 操作,首先是范围 FFT (range-FFT),然后是多普勒 FFT (Doppler-FFT),以便同时测量目标的距离和速度。
信号处理流程概述
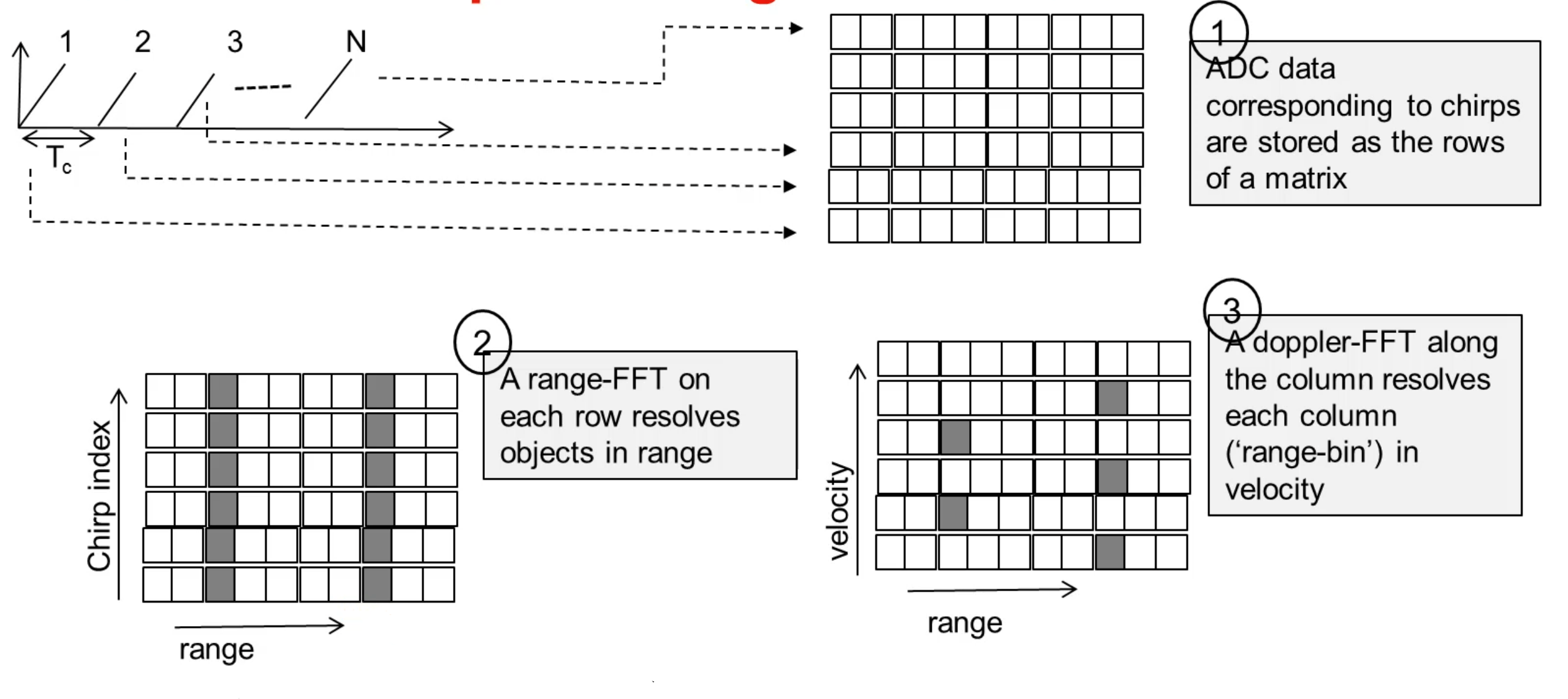
在每个 FMCW 雷达帧中,多个 chirp 信号被传输,并且每个 chirp 对应的 ADC 数据被存储为一个矩阵的行。通过对每一行进行范围 FFT 操作,雷达可以识别不同距离的物体。随后,对矩阵列进行多普勒 FFT 操作,能分辨同一距离上不同速度的物体。
在这个过程中,每一行的数据代表一个通过执行这两个步骤(范围 FFT 和多普勒 FFT),雷达能够得到 2D FFT 结果,从而在距离和速度两个维度上分辨多个物体。在这个过程中,每一行的数据代表一个 chirp 信号的采样,而范围 FFT 会解析每个 chirp 对应的物体距离。
这个过程被称为 2D-FFT。完成范围 FFT 后,我们得到物体的距离信息。接着,通过对矩阵的列执行多普勒 FFT,雷达可以解析出不同物体的速度。该过程使得 FMCW 雷达能够同时在范围和速度上对多个物体进行分辨,从而实现更加精确的目标跟踪。
实时信号处理
在大多数 FMCW 雷达实现中,范围 FFT 通常在 ADC 数据采集到之后立即进行。具体来说,ADC 数据会被传送到数字信号处理器 (DSP),DSP 在接收到每个 chirp 的数据后执行范围 FFT,并将处理结果存储在内存中,如 L3 内存或 DDR 内存。
雷达最大探测距离分析
在1.1 中,我们讨论了最大ADC采样率如何限制雷达的最大探测距离。另一个影响最大距离的重要因素是反射信号的强度。为了使雷达能够检测到反射信号,信号的强度必须足够强。
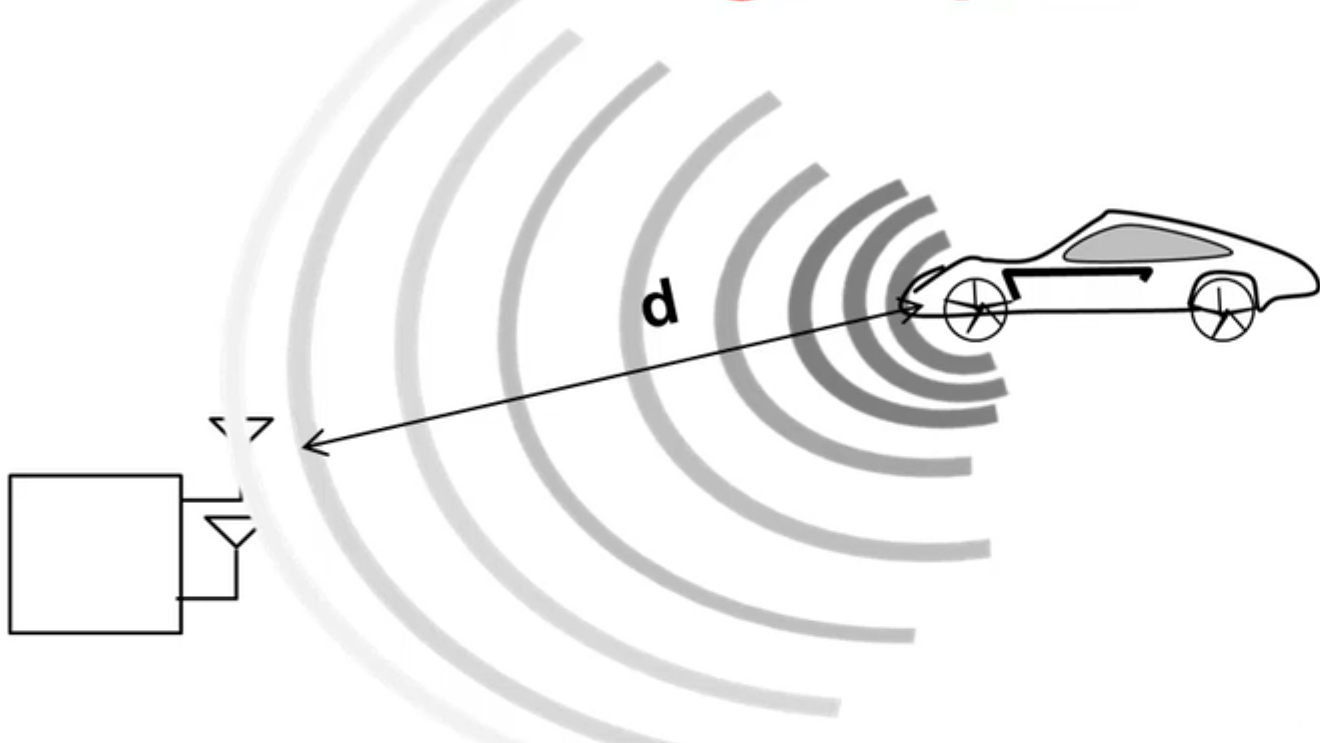
根据下图,假设雷达设备的输出功率为 Pt (瓦特),信号从发射天线辐射出去,随着距离的增加,功率密度随距离的平方衰减。
辐射功率密度公式:
反射回来的功率由目标物体反射回来,并随距离衰减。通过加入目标的雷达散射截面 (RCS),可以表示反射功率:
接收天线的功率密度:
接收天线捕获的功率:
其中,ARX 是接收天线的有效孔径面积,可以通过天线增益和操作波长表示:
将其代入上面的公式,最终得到接收天线捕获功率的公式:
目标是否可检测不仅仅取决于接收信号的功率,还取决于信号能量与噪声能量的比值,即信噪比(SNR)。
SNR 公式:
信号的强度和噪声的影响决定了雷达的有效探测能力。SNR 是一个必须达到的最小值(SNRmin),这对于目标的检测至关重要。选择 SNRmin 是一个权衡过程,它影响着漏检的概率和误报的概率。
给定一个最小 SNR,可以通过以下公式计算雷达能够看到的最大距离:
上述公式中,许多参数(如天线增益和设备的输出功率)都取决于硬件,而测量时间 Tmeas 是在设计发射信号时可以调整的。
评论