FMCW 雷达 · 到达角(AoA)估计
之前的内容聚焦于距离和速度。本节引入第三个维度: 角度(Angle of Arrival, AoA)。 我们关心:雷达如何估计目标的入射角?多个目标角度不同但距离/速度可能相同时该如何区分? 角度视场与角分辨率受哪些因素决定?
1)回顾:距离微变引起的相位变化
对单目标,IF 信号峰值的相位对距离非常敏感。目标距离发生微小变化 \(\Delta d\) (对应往返路径变化)时,相位变化为:
2)角度估计的基本思路(至少 2 个 RX)
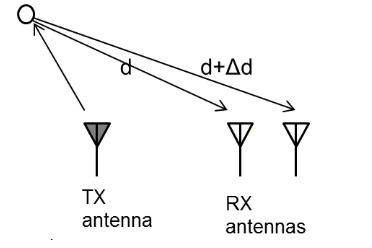
角度估计利用两个接收天线到同一目标的几何路径差。 设目标到 RX1 与 RX2 的路程差为 \(\Delta d\),则同一“范围-速度峰”处两通道的相位差:
若相邻 RX 天线间距为 \(d\),且目标足够远(平面波近似),则 \(\Delta d = d\sin\theta\)。 于是:
为何 \(\tfrac{4\pi\Delta d}{\lambda}\) 与 \(\tfrac{2\pi\Delta d}{\lambda}\) 相差 2? 前者源于距离微变带来的往返路径相位变化(TX→目标→RX), 后者比较的是同一时刻两只 RX的单程几何路径差。
3)流程要点
TX 发送一帧等间隔 chirp;各 RX 分别做 Range-FFT 与 Doppler-FFT,锁定同一目标的范围-速度峰。
跨 RX 在该峰处读取复数值并求相位差 \(\Delta\phi\),用 \(\displaystyle \theta=\sin^{-1}\!\left(\frac{\lambda\,\Delta\phi}{2\pi d}\right)\) 反解 AoA。
4)视场与分辨率(补充)
- 无模糊约束:\(|\Delta\phi|<\pi \Rightarrow |d\sin\theta|<\tfrac{\lambda}{2}\)。 惯常取阵元间距 \(d\le \lambda/2\) 以获得近 \(\pm90^\circ\) 的无模糊视场。
- 角分辨率 \(\propto \lambda/D\),其中 \(D\approx (N-1)d\) 为阵列有效孔径; 更多通道/更大孔径 → 更好的角分辨率。
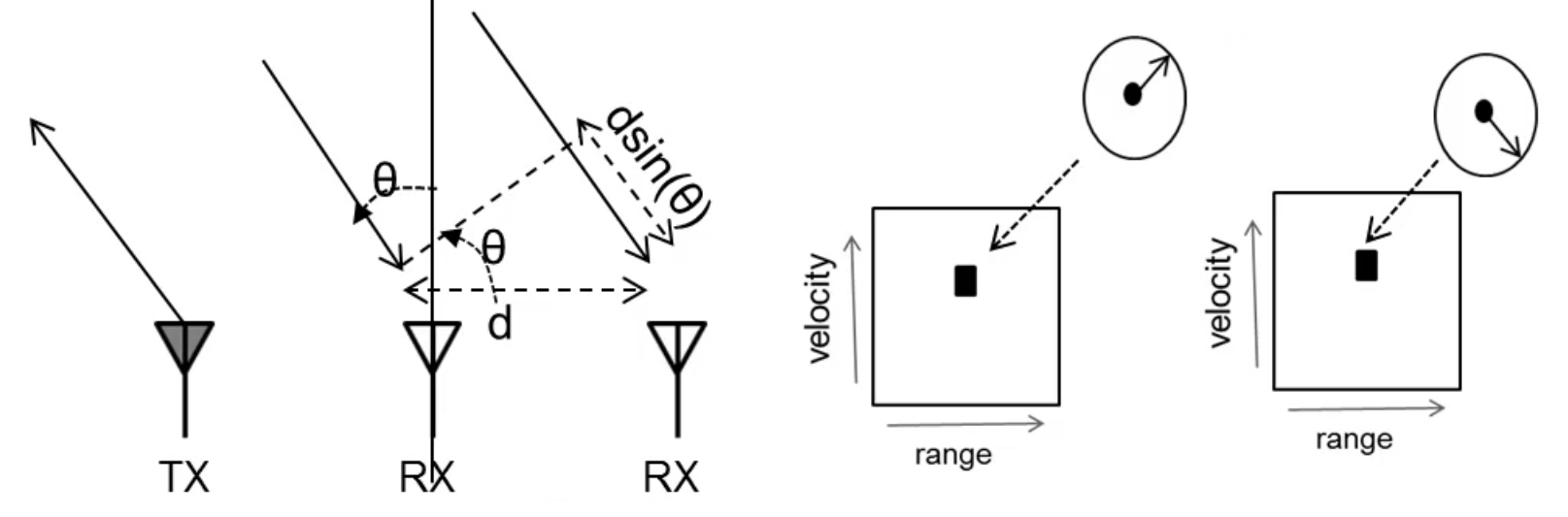
角度估计的非线性与敏感度
角度估计基于峰值相位差与入射角的关系: \[ \Delta\phi=\frac{2\pi d\sin\theta}{\lambda} \] 由于包含 \(\sin\theta\),这是一个非线性关系(不同于速度估计 \(\Delta\phi=\tfrac{4\pi vT_c}{\lambda}\) 的线性关系,以及距离与 IF 频率的线性关系)。
灵敏度可由对 \(\theta\) 的一阶导数刻画: \[ \frac{d(\Delta\phi)}{d\theta}=\frac{2\pi d}{\lambda}\cos\theta \] 因而在 \(\theta\approx 0^\circ\) 时,\(\cos\theta\approx 1\),相位对角度最敏感; 随着 \(\theta\) 增大,\(\cos\theta\) 下降,灵敏度降低; 当 \(\theta\to 90^\circ\) 时,\(\cos\theta\to 0\),灵敏度趋近于零,角度估计最易受噪声影响。
- 最佳工作区间:\(\theta\) 近 0°(目标在雷达正前方),估计精度最高。
- 劣化区间:\(\theta\) 接近 90° 时,\(\sin\theta\) 对 \(\theta\) 的变化不敏感,误差放大。
- 提高精度的思路:增大阵元间距/虚拟孔径(受 无模糊视场 约束)、 提高 SNR、增加快拍数做稳健估计。
最大无歧义视场(FoV)与天线间距
两根接收天线间距为 d,同一目标在两天线的 2D-FFT 峰值存在相位差 \(\;\Delta\phi=\dfrac{2\pi d\sin\theta}{\lambda}\;\)。 为避免角度歧义,跨天线的相位变化必须满足 \(|\Delta\phi|<\pi\)。
由此得到最大可无歧义测得的视场角(左右对称): \[ |\Delta\phi|<\pi \;\Rightarrow\; \theta_{\max}=\sin^{-1}\!\left(\frac{\lambda}{2d}\right). \]
- 当 \(d=\dfrac{\lambda}{2}\) 时,\(\;\theta_{\max}=\sin^{-1}(1)=90^\circ\), 可获得最大的可测视场(约 \(\pm90^\circ\))。
- 若 \(d>\dfrac{\lambda}{2}\),会出现角度模糊(栅瓣/混叠); 若 \(d<\dfrac{\lambda}{2}\),虽无歧义但可测视场将变小。
- 此约束类似“最大速度”限制:它由 跨阵元相位变化不超过 π 的判据决定。
角度 FFT、角分辨率与速度估计的类比
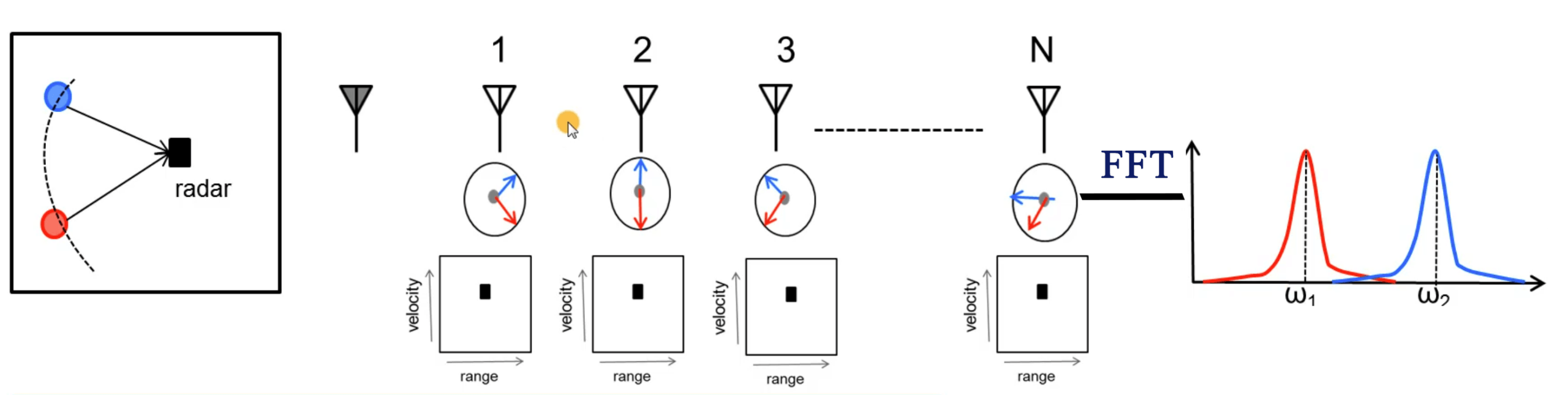
当存在两个目标且距离与速度相同时,它们在各 RX 天线的 2D-FFT 中落在同一“范围-速度”峰上。 将 N 个 RX 天线在该峰处的复数值按天线索引组成序列, 对该序列做一次 FFT(称为 Angle-FFT), 即可分离出不同到达角对应的两个离散角频率 \(\omega_1,\omega_2\)。
Angle-FFT 的角分辨率由阵列长度决定。两目标夹角为 \(\Delta\theta\) 时,其可分辨条件为 \(\Delta(\Delta\phi)> \tfrac{2\pi}{N}\)(离散傅里叶性质),推得角分辨率:
常见标注在 \(d=\lambda/2,\ \theta\approx 0^\circ\) 时:
最大无歧义视场(FoV)由跨天线相位差 \(|\Delta\phi|<\pi\) 给出:
- 角度估计(Angle-FFT):利用空间上分离的天线引起的相位差; 分辨率 \(\propto 1/(N d)\)。
- 速度估计(Doppler-FFT):利用时间上分离的 chirp 引起的相位差; \(\;v_{\rm res}=\dfrac{\lambda}{2T_f}\),\(\;v_{\max}=\dfrac{\lambda}{4T_c}\)。
角度估计总体流程
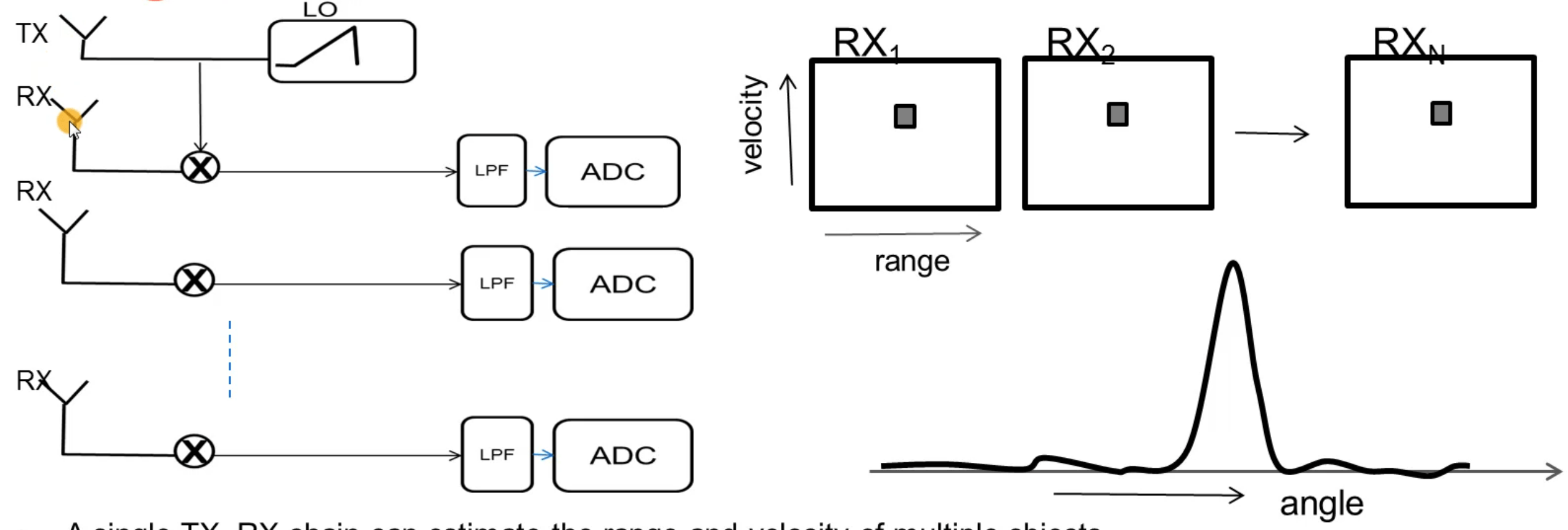
在 FMCW 雷达中,本地振荡器(LO/synth)产生线性调频脉冲(chirp), 由 TX 天线发射;目标回波分别被多路 RX 天线接收。 每路 RX 将回波与同一 LO 混频得到 IF 信号,经 低通滤波(LPF)后进入 ADC 采样,形成一帧数据。
对每路 RX 的整帧数据,先沿快时间(每个 chirp 内)做 Range-FFT, 再沿慢时间(跨 chirp)做 Doppler-FFT,得到该路 RX 的二维谱图 (range × velocity)。二维谱图中的峰值位置给出物体的距离与速度。
Angle-FFT:跨天线峰值相位 → 入射角
由于同一目标在不同 RX 天线上的几何路径不同,导致二维峰值处的复数相位不同。 将各 RX 在同一(range, velocity)峰的复数值按天线索引组成序列, 对该序列做 Angle-FFT:
- Angle-FFT 的峰位置对应不同目标的离散角频率(与 AoA 成函数关系)。
- 对均匀线阵,峰值相位差满足 \(\;\Delta\phi=\dfrac{2\pi d\sin\theta}{\lambda}\;\), 据此可反解角度 \(\;\theta=\sin^{-1}\!\big(\dfrac{\lambda\,\Delta\phi}{2\pi d}\big)\;\)。
一步步信号链
- LO 产生 chirp → TX 发射。
- 多个 RX 接收同一目标回波,与 LO 混频得到 IF。
- IF → LPF → ADC,得到每路 RX 的一帧采样矩阵。
- 每路 RX:Range-FFT → Doppler-FFT → 得到 range × velocity 峰。
- 跨 RX:抽取同一峰的复数值做 Angle-FFT → 峰位置/相位差 → AoA。
要点与设计提示
- 多 RX 天线是角度估计的前提(至少 2 个);阵列长度越大,角分辨率越好。
- 为避免角度模糊,常取阵元间距 \(d\le \lambda/2\),可获得近 \(\pm 90^\circ\) 的最大无歧义视场。
- 实际精度还取决于 SNR、标定(幅相一致性)与 Angle-FFT 的快拍数量(RX 数)。