一、引言
背景
1. NLOS 目标跟踪的挑战
传统的基于雷达的跟踪方法依赖于视距(LOS),但在复杂的环境中,例如城市地区,障碍物常常阻挡直接的电磁波传播。 因此,这些方法往往在实际应用中失效,迫使研究者寻找新的非视距(NLOS)跟踪技术。 NLOS跟踪技术通过多路径传播来重建目标位置,信号通过墙壁或其他表面反射后到达目标。
2. 前人研究
大多数现有的非视距(NLOS)目标跟踪方法假设目标是静态的、路径容易提取,并且目标数量已知。 然而,这些假设在现实应用中过于理想化。 实际情况中,目标往往是动态的,多个目标的轨迹可能会交叉,导致路径提取变得更加复杂。 此外,目标数量未知也会引入路径归属的歧义,增加了目标定位的难度。
Ghost targets
二、多路径建模与实验装置
1) 多径传播模型
模型概述:该模型描述了在非视距(NLOS)场景中的多路径传播情况,参见图1。
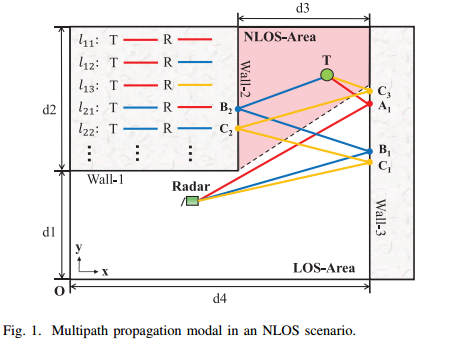
模型设定:
- d1, d2, d3, d4: 通道的长度和宽度。
- O: 模型的原点(左下角)。
- R: 雷达系统的位置(绿色矩形)。
- T: 目标的位置(绿色圆点)。
- LOS 区域: 白色区域,表示视距区域。
- NLOS 区域: 粉色区域,表示非视距区域。
多路径:由于多路径效应,信号会通过多个路径传播到目标位置。在NLOS场景中,这些路径一般分为三类:
- 第一阶路径: 从雷达位置R到A1再到T,A1是墙面3的反射点,标记为红色。
- 第二阶路径: 从R到B1再到B2最后到T,其中B1和B2分别是墙面3和墙面2的反射点,标记为蓝色(原文标的紫色 )。
- 第三阶路径: 从R到C1、C2和C3再到T,其中C1、C2和C3分别是墙面3和墙面2的反射点,标记为黄色(原文竟然标的蓝色)。
路径矩阵:这些不同的传播路径可以表示为一个矩阵 Ψ,其元素 \(l_{ij}\) 代表了不同路径的测量距离,结合了不同阶数的发射和接收路径。
- i, j 分别表示发射和接收路径的反射阶数。
- 矩阵 Ψ 存储了这些路径的距离值:
\[ \Psi = \begin{bmatrix} l_{11} & l_{12} & \cdots & l_{1j} \\ l_{21} & l_{22} & \cdots & l_{2j} \\ \vdots & \vdots & \ddots & \vdots \\ l_{i1} & l_{i2} & \cdots & l_{ij} \end{bmatrix} \]
路径信号的衰减:高阶路径的信号由于传播过程中的衰减可能非常弱,可能难以观测。因为发射机和接收机之间的距离较小,可以假设反射路径 \(l_{ij}\) 和 \(l_{ji}\) 在距离上是相同的。
通过这个模型,研究者能够更好地理解并计算NLOS场景中的多路径传播,为目标定位和跟踪提供必要的理论支持。
2) 系统和数据采集
实验设置:
- FMCW 雷达系统:使用 IWR6843(德州仪器)雷达系统进行数据采集,应用于非视距(NLOS)场景。
- 墙壁材料:墙壁由均匀的、非吸收材料制成,可以反射雷达信号。
- 雷达位置:雷达位于角落后面,朝向角落,并以0.8米的高度安装。
| 参数 | 值 |
|---|---|
| 中心频率 | 60 GHz |
| 带宽 | 1325 MHz |
| 频率斜率 | 33.125 MHz/μs |
| 采样频率 | 3 MHz |
| ADC 样本数 | 64 |
| 频率重复周期 | 40 μs |
| 测距分辨率 | 0.11 m |
| 最大检测范围 | 13.59 m |
| 无歧义速度 | 2.5 m/s |
| 周期性 | 500 μs |
| 帧数 | 25000 |
| Chirp循环数 | 1 |
| 发射功率 | 12 dBm |
场景描述:
- 场景1:L形拐角,墙面为普通的混凝土墙,包含两个移动的人体目标。
- 场景2:T形拐角,墙面为铝质表面,包含三个移动的人体目标。
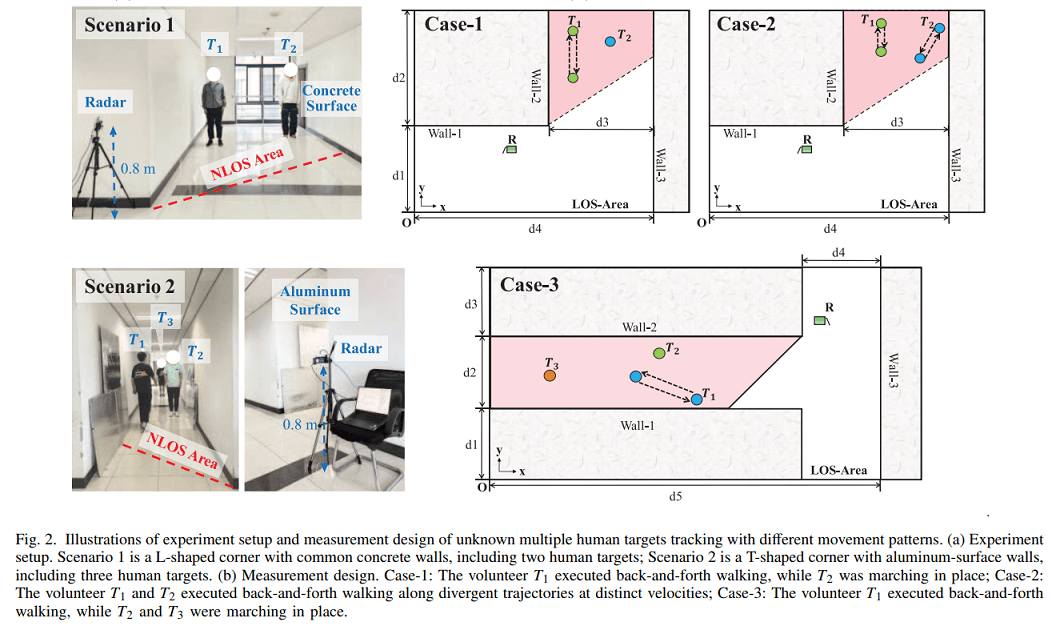
实验案例:
1. 案例1: 一名志愿者在位置 (5.7, 9.4 m) 原地行走,另一名志愿者在NLOS区域内沿 (4.6, 10.0 m) 和 (4.6, 7.0 m) 区域来回行走。
2. 案例2: 两名志愿者在NLOS区域内沿不同的轨迹和不同速度进行来回行走,第一个轨迹为 (4.9, 10.8 m) 和 (4.9, 8.8 m),第二个轨迹为 (6.9, 10.2 m) 和 (6.2, 8.7 m)。
3. 案例3: 一名志愿者在位置 (5.5, 3.2 m) 和 (3.0, 4.0 m) 来回行走,另外两名志愿者分别在 (3.8, 4.6 m) 和 (1.0, 4.0 m) 处原地行走。
| Volunteers | Gender | Age (yr) | Weight (kg) | Height (m) | BMI (kg/m²) |
|---|---|---|---|---|---|
| Case 1 & Case 2 | M | 23 | 60 | 1.72 | 20.28 |
| M | 23 | 85 | 1.91 | 23.30 | |
| Case 3 | M | 24 | 85 | 1.81 | 25.94 |
| M | 23 | 80 | 1.80 | 24.69 | |
| M | 23 | 73 | 1.76 | 23.56 | |
轨迹标定和数据采集:
- 所有志愿者的行走位置和轨迹事先在地面上标定。
- 志愿者被要求严格遵守这些标记,以确保数据采集过程中能够提供准确的地面真实数据,这些数据用于后续的跟踪性能评估。
三、理论与提出的方法
框架概述:图3中展示的框架包括数据采集、未知人体目标计数和目标跟踪三个主要部分。每个部分都有具体的功能处理,如多路径提取、路径确认、路径顺序确定和ECL定位。
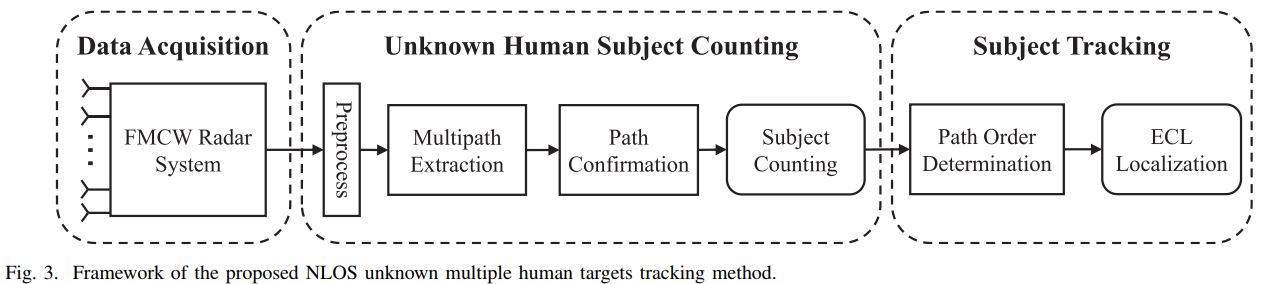
1. 数据采集:通过FMCW雷达系统记录回波信号。
2. 信号处理部分:信号处理分为两个阶段:
- 第一阶段:计数未知人体目标。在预处理后,从时间-距离(TR)图中提取多个路径。然后,使用多路径匹配来确定目标的数量。
- 第二阶段:基于路径关联的方法,采用ECL算法进行路径顺序确定,并进一步进行目标定位,最终实现多目标跟踪。
1) 使用改进的AMTC进行多路径提取
Preprocessing
FMCW雷达发射一个频率随时间线性变化的信号。每一帧中,发射的信号可以表示为:
\( S_t(t) = \exp \left[ j2\pi \left( f_c t + \frac{\Delta B}{2 \Delta T} t^2 \right) \right] \)
其中,\( f_c \) 是载波频率,\( \Delta B \) 是发射信号的带宽,\( \Delta T \) 是传输时间的持续时间。
信号被一个任意物体反向散射后,接收天线接收到反射信号。接收到的信号可以表示为发射信号的时间延迟和衰减形式,如下所示:
\( S_r(t) = \alpha S_t(t – t_d) \)
其中,\( \alpha \) 是路径损失引起的衰减因子,\( t_d = \frac{2R}{c} \) 是时间延迟,\( R \) 是目标的距离,\( c \) 是光速。
然后,接收到的信号与发射信号进行混合,混频器输出经过低通滤波器过滤。得到的基带信号可以表示为一个“拍频信号”。经过采样处理后,目标在距离 \( R \) 的拍频信号可以近似表示为:
\( S_B[n_f, n_s] \approx \exp \left\{ j2\pi \left[ \left( \frac{2R \Delta B}{c \Delta T} + f_d \right) \frac{n_f}{f_s} \right] + f_d n_s \Delta T + \frac{2 f_c R}{c} \right\} + \omega [n_f, n_s] \)
其中,\( n_f \) 是快时间索引,\( n_s \) 是慢时间索引,\( f_s \) 是采样频率,\( f_d \) 是多普勒频移,\( \omega \) 表示加性白噪声,均值为零,方差为 \( \sigma^2 \)。
经过均值滤波预处理后,沿快时间轴进行快速傅里叶变换(FFT),得到时间-距离(TR)图,记为 \( Z \in \mathbb{R}^{R \times T} \)。图中的每个像素可以表示为 \( Z(r, t) \),其中 \( r \) 和 \( t \) 分别表示范围和时间索引。
Gridding Optimization
图4展示了本文 提出的修改版AMTC算法用于多路径提取的流程图。通过网格优化,传统的逐像素路径提取被转换为基于网格的路径提取。
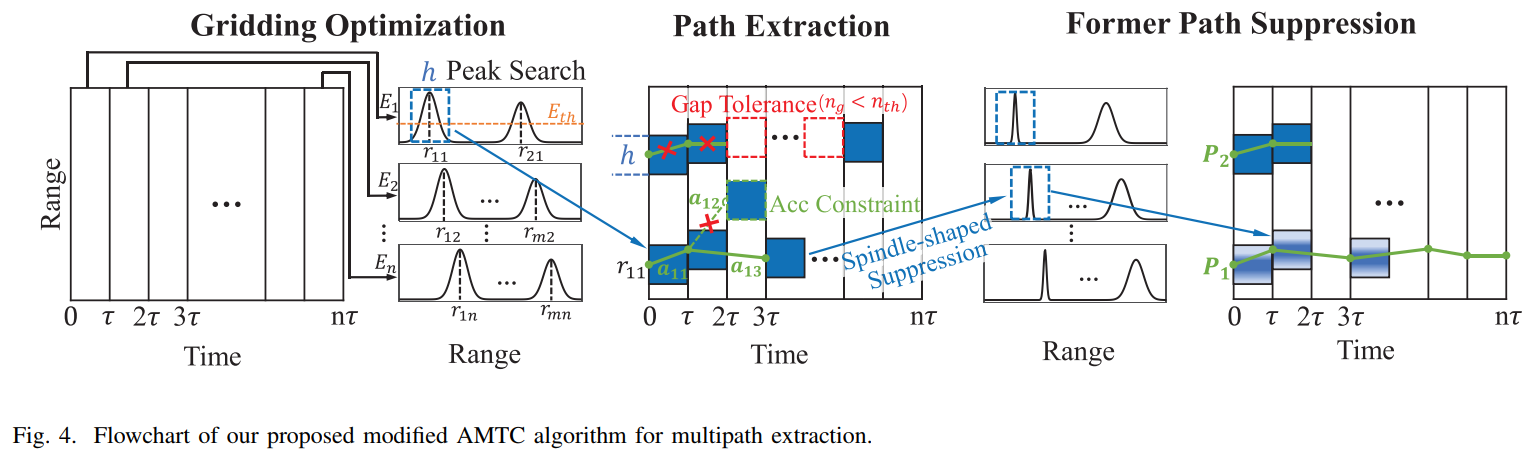
人体目标由于其体积和运动带来的能量泄漏,合理假设一个人体目标会同时占据多个范围格。
1. 时间网格化:对于时间网格化,本文 使用一个不重叠的时间窗口将时间轴分割为多个时间格。每个格的能量可以通过下式计算:
\(E_n = \sum_{t=(n-1)\tau}^{n\tau} Z(r,t), \quad n = 1, 2, 3, \dots, N\)
其中,\( E_n \) 是第n个时间格的能量,\( \tau \) 是每个时间格的时长。
2. 范围网格化:在每个能量曲线 \( E_n \) 上进行峰值搜索,以确定每个时间格的范围坐标:
\(R_n = \{r_{1n}, r_{2n}, \dots, r_{mn}\} = \text{findpeaks}(E_n, E_{th}, h)\)
其中,\(\text{findpeaks}\) 是一个峰值搜索函数,\( E_{th} \) 是能量阈值,\( h \) 是相邻峰之间的最小距离,通常被定义为保护窗口长度,用于忽略旁瓣效应。其值可以根据常见的人体尺寸来预设。\( r_{mn} \) 是第n时间格中的第m个峰的范围坐标,并被存储在向量 \( R_n \) 中。它们将作为候选格,用于后续的路径提取。
经过预处理后,TR图被离散化为网格格式,格网单元的尺寸为 \( h \times \tau \)。因此,逐像素路径提取被转换为基于网格的路径提取,最终提取的路径可以表示为:
\(\hat{f} = \left\{ \left[ \hat{r}_n, n \right] \right\}_{n=1}^N\)
其中,\( \hat{r}_n \in R_n \) 是在时间 \( n\tau \) 时提取的格网范围坐标。
Path Extraction
在路径提取过程中,考虑了两个优化参数,分别用于路径的平滑性和连续性。
为了确保路径的平滑性,采用了加速度约束,将其通过惩罚函数引入候选网格的能量计算中,有效地缓解了轨迹的突变。更新后的能量图可以表示为:
\( G[r_{mn}, n] = \begin{cases} E[r_{mn}, n], & n = 1, 2 \\ E[r_{mn}, n] \cdot \lambda \cdot P[m, n], & r_{mn} \in R_n \end{cases} \)
其中,\( E[r_{mn}, n] \) 表示在第nτ时间格中的第rmn网格的能量,\( \lambda > 0 \) 是控制提取路径平滑性的正则化参数,\( P[m, n] = e^{-a_{mn}} \) 是惩罚函数,\( a_{mn} \) 是加速度。
加速度 \( a_{mn} \) 可以通过前后速度差来计算,具体公式如下:
\[ \begin{aligned} a_{mn} &= \left| \frac{v_n(n-1) – v_{n-1}(n-2)}{\tau} \right| \\ &= \left| \frac{r_{mn} – \hat{r}_{n-1}}{\tau} – \frac{\hat{r}_{n-1} – \hat{r}_{n-2}}{\tau} \right| \\ &= \frac{1}{\tau} |r_{mn} – 2\hat{r}_{n-1} + \hat{r}_{n-2}| \end{aligned} \]
其中,\( \hat{r}_{n-1} \) 和 \( \hat{r}_{n-2} \) 分别表示在 \( (n-1)\tau \) 和 \( (n-2)\tau \) 时刻提取的格网范围坐标,\( v_{n-1}(n-2) \) 表示它们之间的速度。
因此,合理的路径提取是最大化所有时间格中能量的路径,表示为:
\( \hat{f} = \arg \min_f \sum_{n=1}^N G[r_{mn}, n] \)
为了处理因低信噪比(SNR)和多路径效应而产生的潜在不连续性,路径提取框架中引入了预定义的间隙容忍阈值 \( n_{th} \)。当间隙网格数量 \( n_g \) 小于阈值时(\( n_g < n_{th} \)),可以安全忽略这些间隙,从而允许不中断地进行路径提取。反之,如果 \( n_g \geq n_{th} \),受影响的路径段将被丢弃作为无效路径。选择 \( n_{th} \) 是一个关键的权衡:容忍度不足会无法桥接轨迹不连续,而过高的容忍度则增加了错误关联的风险。
Former Path Suppression
在初步的路径提取之后,为了减少前路径对后续路径提取的干扰,设计了一个纺锤形能量抑制方法,对每个格沿前路径进行处理。
在提取的网格 \( G[\hat{r}, n] \) 中,抑制后的能量定义为:
\[ Z^*(d,t) = \frac{1}{1 + J_0 \left( \frac{d – \hat{r}_n}{\hat{r}_n} \right)} Z(dt) \\ \]
\( d \in \left[ \hat{r}_n – \frac{h}{2}, \hat{r}_n + \frac{h}{2} \right], \quad t \in [n\tau, (n+1)\tau] \)
其中,\( d \) 和 \( t \) 分别表示第n个提取路径网格中的范围和时间索引,\( Z(l,t) \) 表示在提取网格 \( [\hat{r}_n, n] \) 中的像素能量。\( J_0 \) 是零阶贝塞尔函数,定义如下:
\( J_0(x) = \frac{1}{\pi} \int_0^\pi \cos(x \sin \theta) d\theta \)
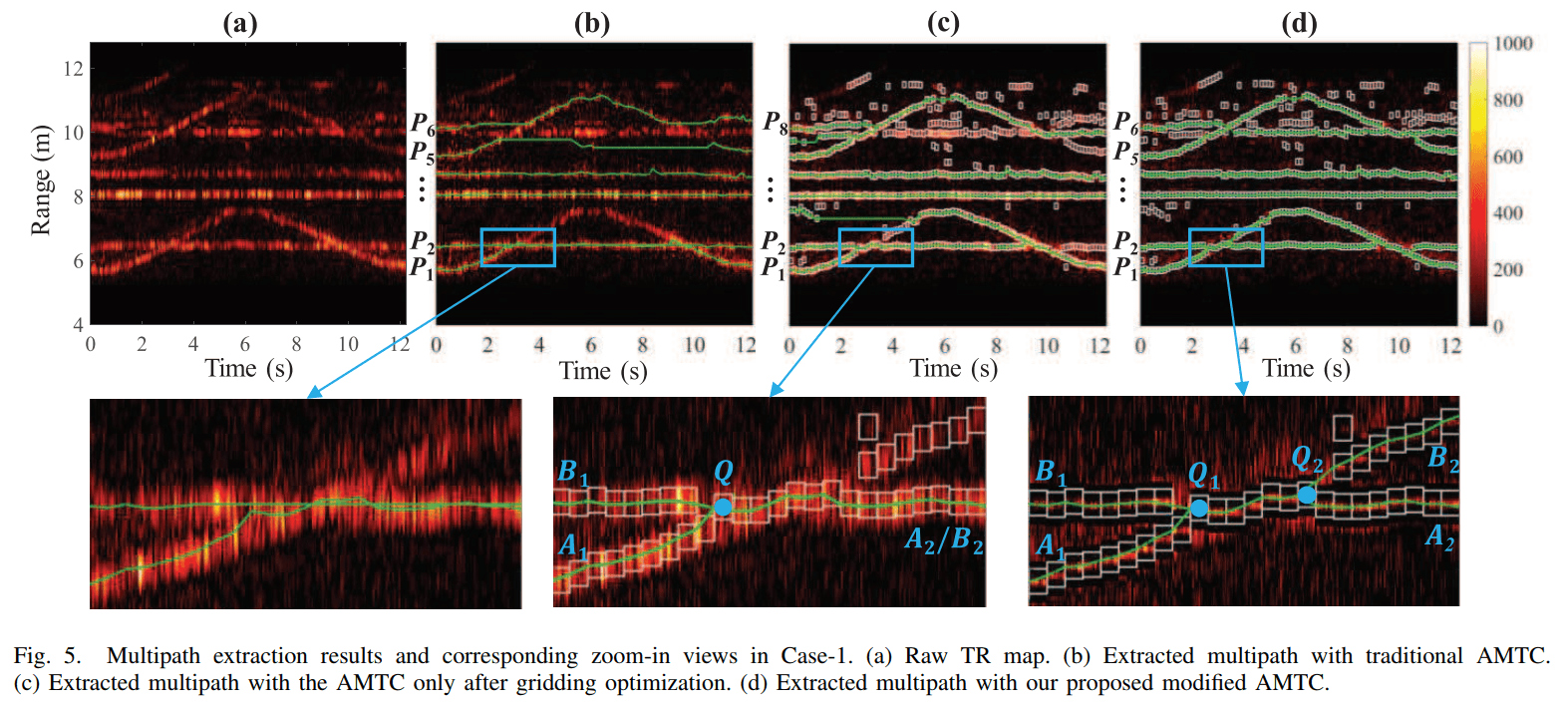
数据来自案例1,用于直观展示多路径提取结果。具体来说,图5(a)显示了接收信号的原始TR图。可以观察到从6到12米的多个路径,它们可能共享同一信号源,但由于多路径引起的不同传播时延,位于不同的范围格中。此外,信号的低SNR和噪声干扰也影响了路径的提取。
图5(b)显示了传统AMTC算法提取的路径。可以看到,提取了六条路径,并且标记为绿色线。特别是在P1和P2的交点处,出现了明显的错误提取。交点后,P2的提取轨迹受到旁瓣干扰,导致其与P1合并。
图5(c)展示了经过网格优化后的AMTC提取路径。网格优化将逐像素提取转换为基于网格的提取。换句话说,提取的路径由一系列网格坐标组成,白色矩形标记了网格单元。通过考虑人体大小和时间分辨率,设定了 \( h = 0.4 \, \text{m} \) 和 \( \tau = 0.125 \, \text{s} \)。共提取了八条路径。显然,P3是一条错误路径,由于间隙过长被误提取,而P7的部分轨迹与P6合并。在交点Q附近的放大视图中,路径 \( A_1 \to Q \to A_2 \) 属于P1,而 \( B_1 \to Q \to A_2 \) 是P2的一部分。P2的错误提取与P1共享了相同的轨迹,导致了错误的估计。
图5(d)展示了本文 提出的算法提取的路径。与图5(c)的结果相比,引入的间隙容忍成功消除了图5(c)中的错误路径P3和P7。这里,\( n_{th} \) 设置为4,对应的间隙容忍时间为0.5秒。在交点段的放大视图中,P1和P2被正确提取,只显示了 \( Q_1 \to Q_2 \) 之间的瞬时重叠,之后继续在不同的路径上。值得注意的是,在提取P1后,惩罚函数有效地抑制了P1的能量,防止了P2的提取重新追踪到P1。同时,其纺锤形结构保持了网格的中心能量,确保了交点段 \( Q_1 \to Q_2 \) 中的轨迹,并避免了P2路径的丢失。
总体而言,本文 提出的修改版AMTC算法成功提取了NLOS场景中多个未知人体目标的所有六条路径。
2) 基于多普勒一致性的路径确认
尽管本文 的修改版AMTC算法已经准确地提取了多个路径,但相邻路径的交点会导致路径段的归属模糊性。需要注意的是,属于同一路径的段应该具有相同的多普勒模式。因此,提出了一种基于路径内多普勒一致性的方法来进行路径确认。
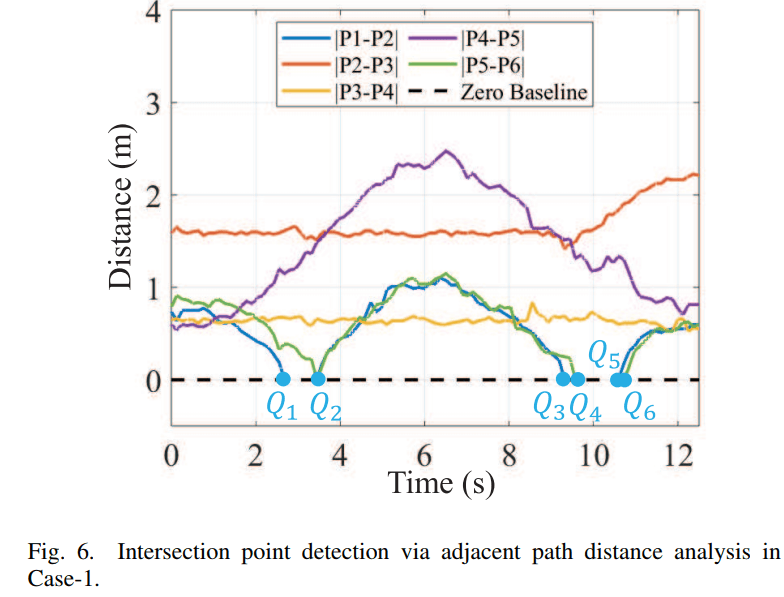
首先,可以利用相邻路径的距离来找到并定位路径交点。如图6所示,在案例1中,识别出6个零交叉点 \( Q_1 \) 到 \( Q_6 \) 作为交点,并在图中用蓝色圆圈标出。它们被视为交点段的开始和结束点。特别地,\( P_1, P_2 \) 和 \( P_5, P_6 \) 共享相同的交点 \( Q_2 \)。图7展示了案例1中交点附近未确定的路径段。值得注意的是,检测到的交点将路径分割为多个段,这些段在归属上存在模糊性。
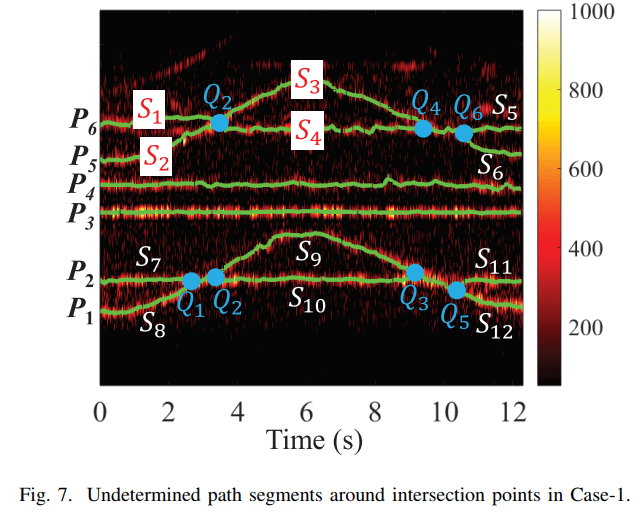
接下来,分析并比较这些路径段的多普勒一致性,以确定它们之间的连接关系。图8展示了围绕交点 \( Q_2 \) 的路径段匹配结果。图8(a)展示了段 \( S_1 \) 到 \( S_4 \) 的时间-多普勒图及其对应的时间-多普勒包络线。需要注意的是,\( S_1 \) 和 \( S_2 \) 具有相同的时间持续时间,从路径开始到交点 \( Q_2 \),而 \( S_3 \) 和 \( S_4 \) 表示从 \( Q_2 \) 到 \( Q_4 \) 的路径。由于它们的时间持续时间不同,采用FFT对时间-多普勒包络线进行处理,以获取运动节奏特征,如图8(b)所示。从图8(b)中可以观察到,\( S_1 \) 和 \( S_4 \) 共享相同的节奏峰值频率 1.50 Hz,而另外两个路径段的频率为 1.25 Hz。因此,\( S_1 \to S_4 \) 可以确定为路径 \( P_6 \) 的轨迹,而 \( S_2 \to S_3 \) 被归类为 \( P_5 \) 的轨迹。
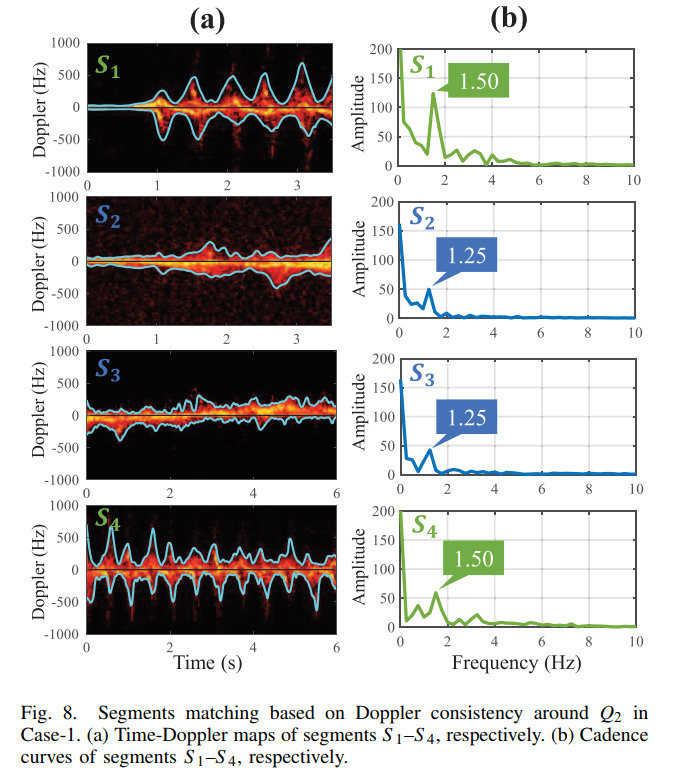
类似的处理可以应用于其他交点周围的路径确认。
公式:路径段的多普勒一致性和轨迹匹配通过以下公式来表示:
\[ \begin{aligned} P_1 & : S_8 \to S_9 \to S_{12} \\ P_2 & : S_7 \to S_{10} \to S_{11} \\ P_5 & : S_2 \to S_3 \to S_6 \\ P_6 & : S_1 \to S_4 \to S_5 \end{aligned} \]
3) 基于多普勒相似性的目标计数
尽管由于NLOS多路径回波引起的幽灵目标在不同位置,但由于传播时延,它们共享相同的信号源。因此,基于路径内多普勒一致性的段匹配方法可以扩展为基于路径间多普勒相似性的多路径匹配方法,用于目标计数。
每个完整路径的多普勒模式通过FFT提取并分析,以找到其特征运动节奏。它们对应的峰值频率列在表III中。注意,路径P1和P5的节奏频率均为1.50 Hz,而其他路径的频率为1.25 Hz。因此,P1和P5可以视为一对,并最终与同一目标关联。剩余的路径P2、P3、P4和P6可以归类为另一目标。换句话说,案例1中的人体目标数量为2个,这与真实情况一致。
| Path | Cadence Frequency (Hz) | Target Attribution | Order |
|---|---|---|---|
| P1 | 1.25 | T1 | l11 |
| P2 | 1.50 | T2 | l11 |
| P3 | 1.50 | T2 | l12 |
| P4 | 1.50 | T2 | l22 |
| P5 | 1.25 | T1 | l12 |
| P6 | 1.50 | T2 | l13 |
4) 目标跟踪
利用前面提到的目标数量及其对应的多路径回波,可以在每个时间格中实现单个目标的位置确定,从而实现多目标跟踪。为了完成这一任务,引入了ECL算法。
根据发射和接收路径的类型,往返路径可以分为两组:“圆形”组和“椭圆”组。特别地,当发射路径和接收路径相同时,即 \( l_{ij}(i = j) \),该路径被归类为“圆形”组,其对应的多路径轨迹是一个圆形。相反,当发射路径和接收路径不同时,即 \( l_{ij}(i \neq j) \),该路径属于“椭圆”组,对应的多路径轨迹呈椭圆形。
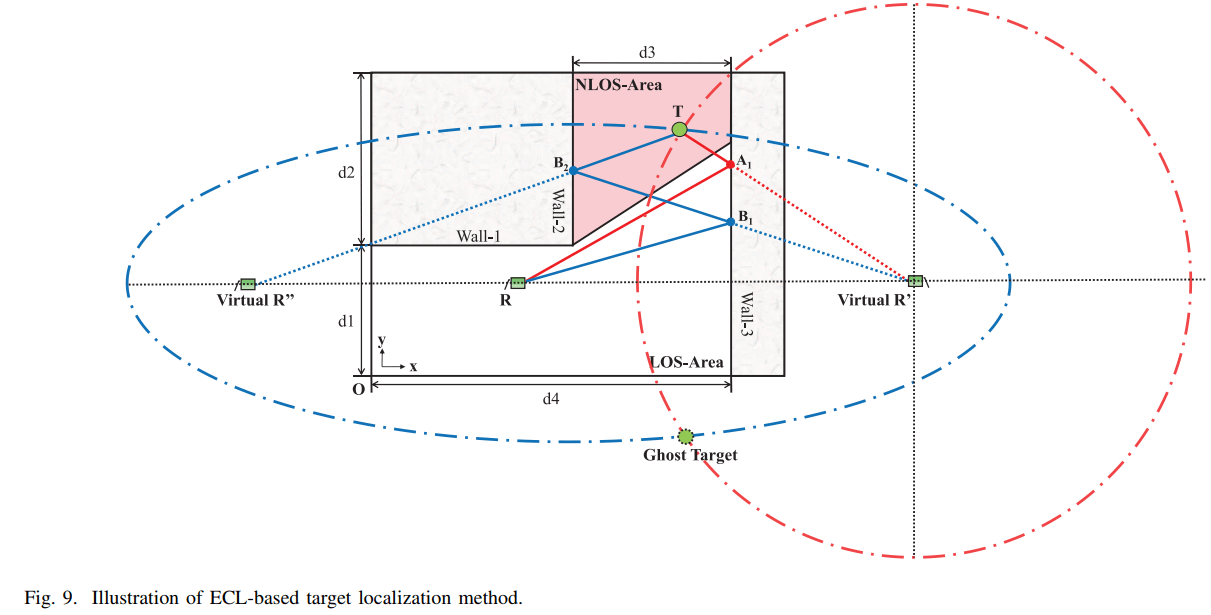
图9展示了基于ECL的目标定位方法的示意图。假设一个单目标的候选路径对应于 \( l_{11} \),其传播路径应为 \( R \to A1 \to T \to A1 \to R \),目标应位于以 \( R’ \) 为中心,半径为 \( \frac{1}{2}l_{11} \) 的圆上,如红色虚线所示。另一方面,同一目标的另一个候选路径为 \( l_{12} \),发射路径为第一阶路径 \( R \to A1 \to T \),而接收路径为第二阶路径 \( T \to B2 \to B1 \to R \)。对应的目标应位于焦点为 \( R \) 和 \( R’ \) 的椭圆上,长轴长度为 \( l_{12} \),如蓝色虚线所示。由此,目标应位于红色圆和蓝色椭圆的交点上。此外,可以识别并移除幽灵目标,因为它们不在雷达检测区域内。通常,通过已知的两个候选路径顺序,可以确定目标的真实位置。由于前一节已经实现了目标数量和多路径归属,可以应用基于多路径关联的ECL算法来确定候选路径的详细反射顺序,并实现目标位置的确定。
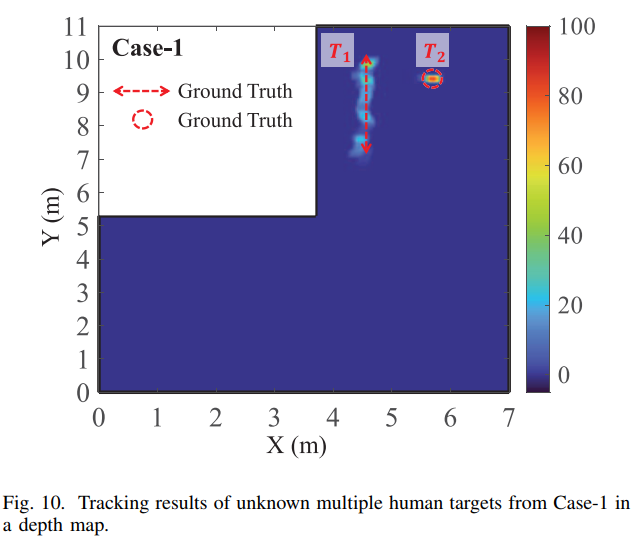
在深度图中,图10显示了案例1中多个未知人体目标的跟踪结果。红色虚线和圆圈分别表示目标1和目标2的轨迹的真实情况。从图中可以观察到,两个人体目标成功地被识别出来,且没有先验知识。此外,跟踪轨迹与真实轨迹的吻合度非常高。
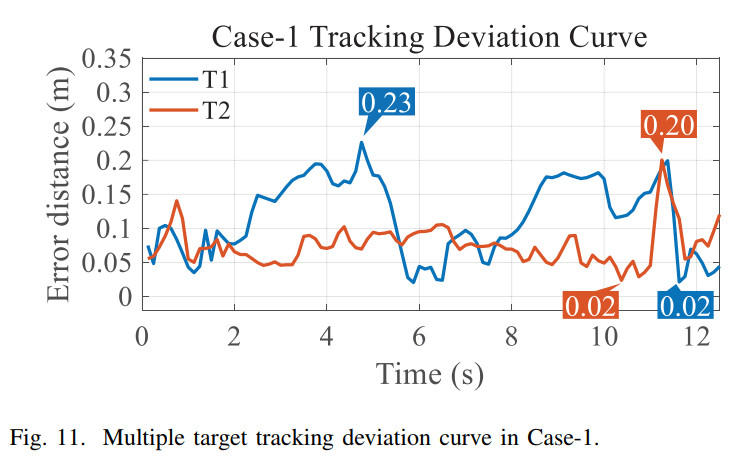
此外,计算了每个时间格中估计的目标位置与其对应的真实位置之间的距离,从而得到了跟踪偏差曲线,如图11所示。测量结果表明,目标T1的平均跟踪误差为0.12米,最大误差和最小误差分别为0.23米和0.02米。而对于目标T2,所提出的方法在实现改进性能的同时,平均偏差为0.07米,保持相同的最小误差(0.02米),并将最大误差降至0.20米。实验结果验证了所提方法的可行性和优越的精度。
| Step | Description |
|---|---|
| Input:
1. Candidate paths: 一组单目标的候选路径 \( L = [l_1, l_2, …, l_k] \) 2. Heuristic threshold: 启发式阈值 \( l_h \). |
|
| Output: Target location: 目标的真实位置 \( T_{true} \). | |
| Step1 | 选择L中最强的两个路径,记为 \( l_{max1} \) 和 \( l_{max2} \)。 |
| Step2 | 在假设最高阶路径为 \( q \) 的前提下,选择 \( M = C_{q+1}^{2} \) 的组合,得到 \( l_{max1} \) 和 \( l_{max2} \) 的可能组合。 |
| Step3 | 对每个 \( l_{max1} \) 进行分析,假设其为最强路径,得到目标候选路径 \( T_{candi} \),并通过ECL算法得到。 |
| Step4 | 路径位置与其他顺序的路径通过 \( T_{candi} \) 得到,并以向量形式进行堆叠。 |
| Step5 | 计算关联因子 \( N^m \) 和 \( E^m \)。 |
| Step6 | 重复步骤3到步骤5,并堆叠关联因子,得到目标路径 \( T_{true} \) 的位置。 |
| Step7 | 选择具有最大关联因子的 \( T_{candi} \),并最终确定目标真实位置。 |
四、结果与讨论
1) 示例2未知人体目标跟踪结果
使用本文 提出的修改版AMTC算法对案例2中的多路径进行提取。图12展示了总共提取的五条路径(P1至P5),标记为绿色线条。对于案例2中的两个目标,它们都进行了前后步态行走,提取的路径显示出沿时间轴的相似变化。
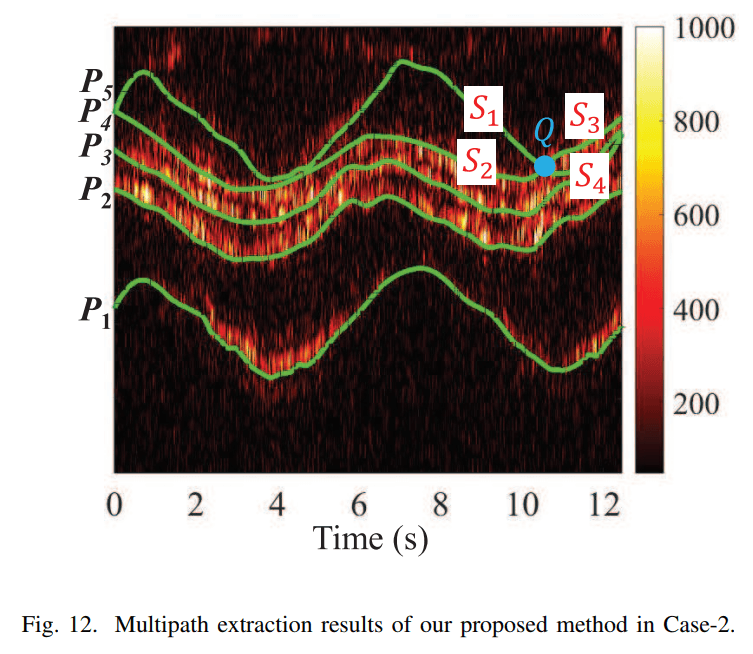
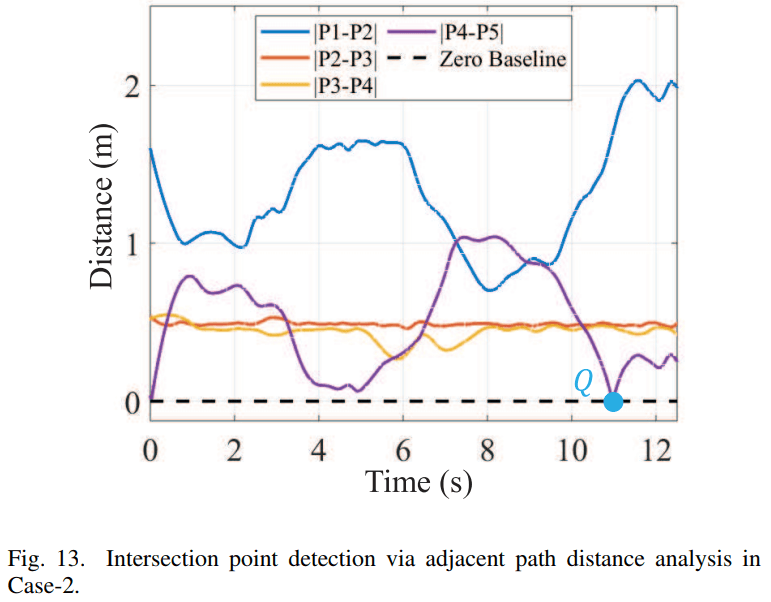
接下来,计算相邻路径之间的距离来确定交点。如图13所示,忽略P1和P5的交点,距离曲线在10.58秒时发现了一个零交叉点Q。在图12中定位交点Q后,可以获得四个未确定的路径段 \( S_1 \) 到 \( S_4 \),这些段将用于后续的路径确认。
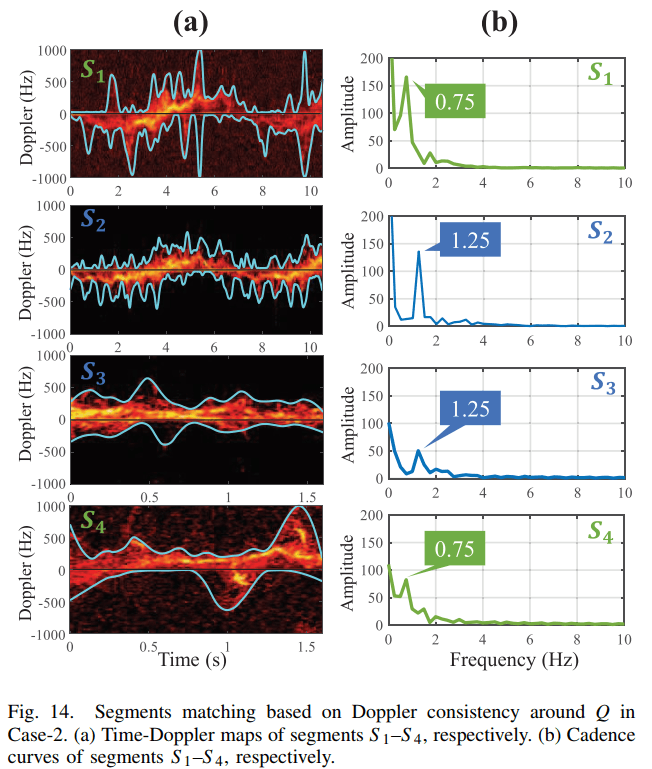
然后,分析路径内的多普勒一致性来确定这些路径段的归属。如图14所示,提取了它们的时间-多普勒图和相应的运动节奏特征进行比较。可以观察到,\( S_1 \) 和 \( S_4 \) 共享相同的节奏峰值频率1.25 Hz,而另外两个路径段的频率为0.75 Hz。因此,\( S_1 \to S_4 \) 可以被识别为P5的轨迹,而 \( S_2 \to S_3 \) 则归为P4。
每个完整路径的节奏特征可以提取出来,用于多路径匹配,以确定路径归属和目标数量。如表IV所示,路径根据节奏频率分类。因此,案例2中的目标数量可以确定为2个。P1和P5属于以0.75 Hz为节奏频率的人体目标,而其他路径与另一个目标关联,其节奏频率为1.25 Hz。
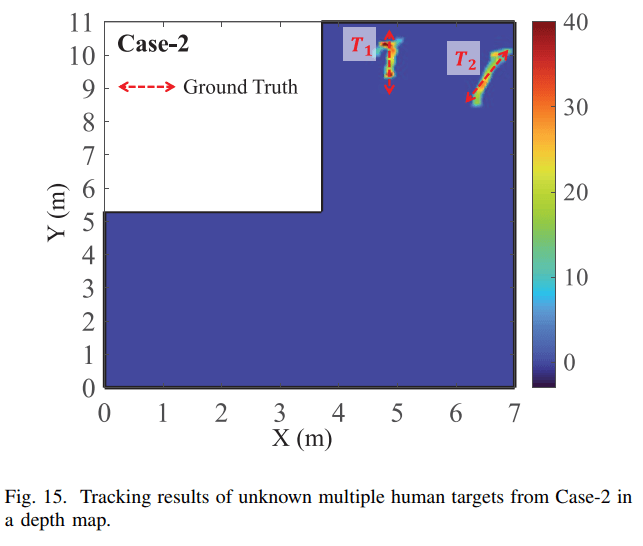
图15展示了案例2中两个移动人体目标的跟踪结果。在深度图场景中,红色虚线表示真实轨迹。可以观察到,跟踪结果与真实轨迹吻合良好。
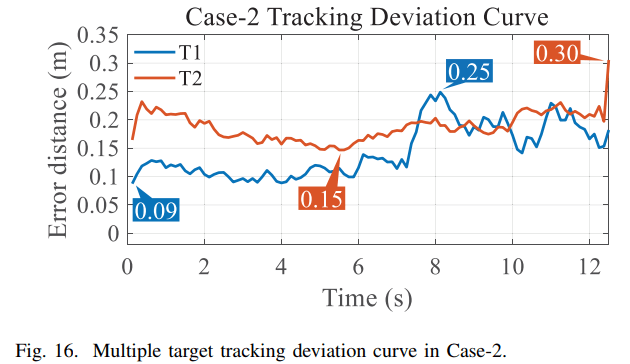
图16展示了目标T1和T2的跟踪偏差曲线。目标T1的平均误差为0.15米,最大误差和最小误差分别为0.25米和0.09米。而目标T2的跟踪结果实现了0.19米的平均偏差,最大误差为0.30米,最小误差为0.15米。尽管相较于案例1,两个移动目标之间的相互遮挡增加了误差风险,但所有估计都保持在可接受的偏差范围内。
| Path | Cadence Frequency (Hz) | Target Attribution | Order |
|---|---|---|---|
| P1 | 0.75 | T2 | l11 |
| P2 | 1.25 | T1 | l11 |
| P3 | 1.25 | T1 | l12 |
| P4 | 1.25 | T1 | l22 |
| P5 | 0.75 | T2 | l12 |
2) 示例3未知人体目标跟踪结果
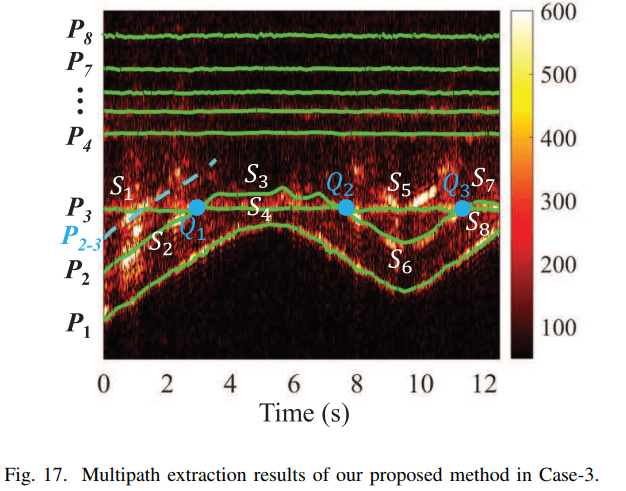
在案例3中,检测目标的数量增加至3个,其中一个目标进行前后步态行走,另外两个目标在不同的位置行进。图17展示了提取的八条路径(P1到P8),用绿色线条表示。需要注意的是,候选路径P2−3(用浅蓝色虚线标记)被假定为行走目标的l22路径。然而,在4到8秒期间,由于其他目标遮挡了第二阶路径,因此该候选路径被丢弃。
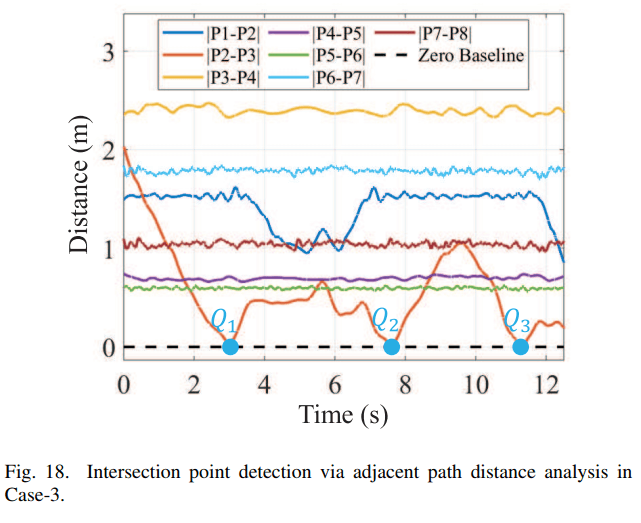
图18展示了通过相邻路径分析检测到的交点。在此过程中发现了三个零交叉点 \( Q_1 \)、\( Q_2 \) 和 \( Q_3 \),分别出现在3秒、7.60秒和11.33秒处。这些交点将路径P1和P2分割成八个段 \( S_1 \) 到 \( S_8 \)。然后,根据路径内的多普勒一致性进行了段匹配,结果列在表V中。
从表V可以看出,\( S_1 \)、\( S_4 \)、\( S_5 \) 和 \( S_8 \) 在提取的节奏频率上都为1.75 Hz,而其他四个段的频率为1.50 Hz。因此,前四个段构成路径P3,剩下的四个段归类为路径P2。
一旦路径确认完成,就可以提取每条完整路径的节奏特征进行多路径匹配,以确定路径的归属和目标数量。如表VI所示,路径根据节奏频率被分类。案例3中的目标数量可以确定为3个,P1和P2属于节奏频率为1.50 Hz的行走目标,而P3到P8则与其他目标相关,节奏频率分别为1.75 Hz(P3、P5、P7)和1.00 Hz(P4、P6、P8)。
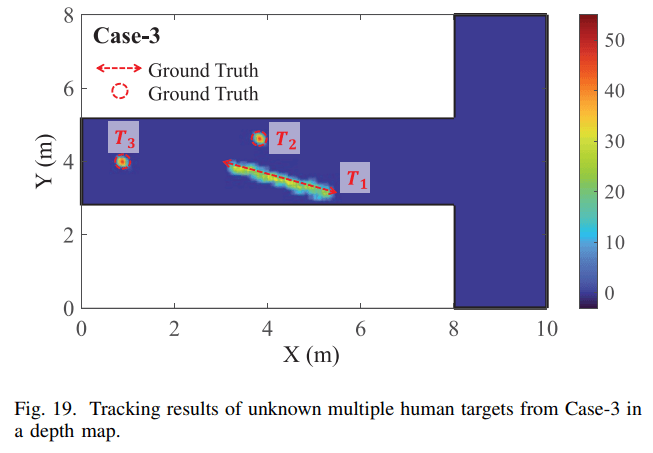
图19展示了案例3中三个移动人体目标的跟踪结果。红色虚线表示真实轨迹。可以观察到,跟踪结果与真实轨迹高度一致。
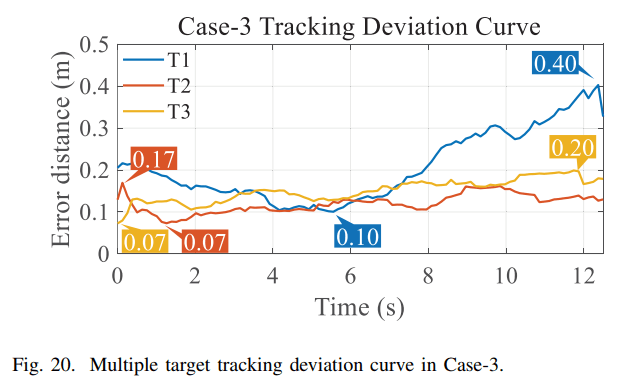
图20展示了目标T1、T2和T3的跟踪偏差曲线。目标T1的平均误差为0.20米,最大误差和最小误差分别为0.40米和0.10米。而目标T2和T3的跟踪误差分别为0.12米和0.15米,最大误差分别为0.25米和0.20米。尽管T1的跟踪误差在轨迹末端有所增加,但所有估计都保持在可接受的偏差范围内。
| Segment | Cadence Frequency (Hz) | Segment Attribution |
|---|---|---|
| S1 | 1.75 | P3 |
| S2 | 1.50 | P2 |
| S3 | 1.50 | P2 |
| S4 | 1.75 | P3 |
| S5 | 1.75 | P3 |
| S6 | 1.50 | P2 |
| S7 | 1.50 | P2 |
| S8 | 1.75 | P3 |
| Path | Cadence Frequency (Hz) | Subject Attribution | Order |
|---|---|---|---|
| P1 | 1.50 | T1 | l11 |
| P2 | 1.50 | T1 | l12 |
| P3 | 1.75 | T2 | l11 |
| P4 | 1.00 | T3 | l11 |
| P5 | 1.75 | T2 | l12 |
| P6 | 1.00 | T3 | l12 |
| P7 | 1.75 | T2 | l22 |
| P8 | 1.00 | T3 | l22 |