IF信号与物体位移变化
本节讨论了当物体前方发生微小位移时,雷达 IF 信号(中频信号)在频率和相位上的变化。首先,我们来回顾 TX(发射)信号与 RX(接收)信号的时域图。TX 信号的时域图(上图)是一个连续的线性调频信号。RX 信号是 TX 信号的延迟版本,延迟量为往返时间 \(\tau\),这个延迟与物体的距离相关。
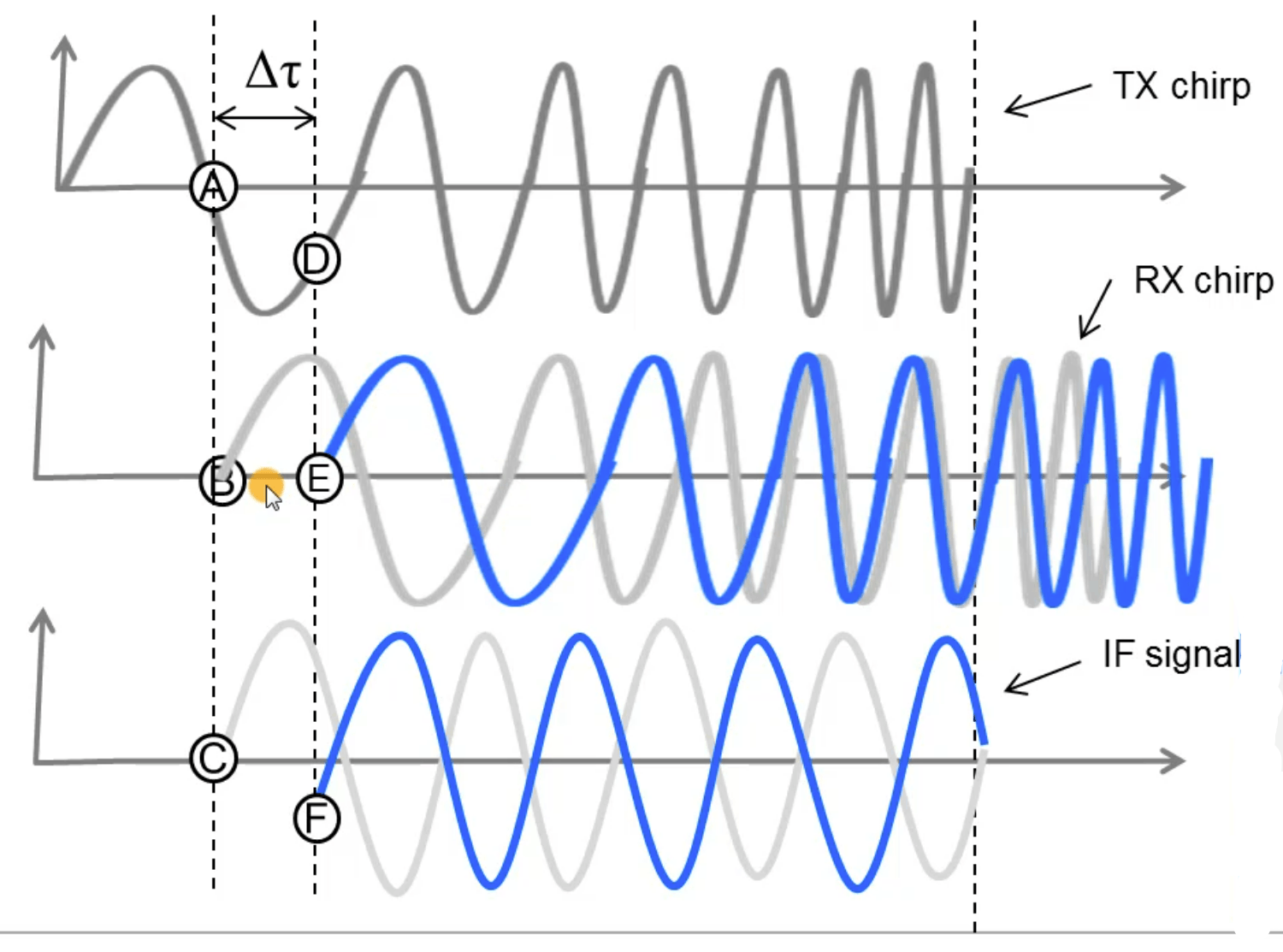
对于单个物体,IF 信号将是一个常频率信号,表示为一个正弦波。IF 信号的频率与物体的距离 \(d\) 成正比。IF 信号的数学表示式为:
\( A \cdot \sin(2 \pi f t + \phi_0) \)
其中,\(f = \frac{S \cdot 2d}{c}\),\(S\) 为斜率,\(d\) 为物体到雷达的距离,\(c\) 为光速,\(\phi_0\) 是初始相位。
IF 信号的相位变化与物体的距离变化相关。假设物体移动了一个很小的距离 \(\Delta d\),相应的往返延迟时间 \(\Delta \tau\) 发生了变化。
物体位移对相位和频率的影响
假设物体发生了 \(\Delta d = 1\) 毫米的位移。通过之前的公式,我们可以计算出相位变化和频率变化。
相位变化:\(\Delta \phi = 2 \pi f_c \Delta \tau = \frac{4 \pi \Delta d}{\lambda}\)
其中,\(\lambda\) 是信号的波长,\(\Delta d = 1\) 毫米。
计算得到,如果物体移动 1 毫米,相位变化为 180 度。
频率变化:\(\Delta f = \frac{S \cdot 2 \Delta d}{c}\)
对于给定的斜率 \(S = 50 \, \text{MHz}/\mu s\),通过代入公式计算频率变化得到 \(\Delta f = 333 \, \text{Hz}\)。
尽管频率发生了 333 Hz 的变化,但在 40 微秒的观察窗口内,这对应的是 0.013 个周期的变化,因此在频谱中不易察觉。
总结:IF 信号的相位对物体距离的微小变化非常敏感,而频率变化则不太容易察觉。
FMCW 雷达与物体位移测量
当物体发生微小位移时,IF 信号的起始相位发生变化。这会导致 FFT 频谱中的峰值相位发生变化。下图展示了物体从位置 A 移动到位置 B 时,信号相位的变化。
对于一个物体,IF 信号是一个正弦波,具有固定的频率和相位。当物体发生微小位移时,相位发生变化。在图中,物体从位置 A 移动到位置 B,假设物体移动了 1 毫米,这样相位变化了 180 度。
相位差与物体运动速度
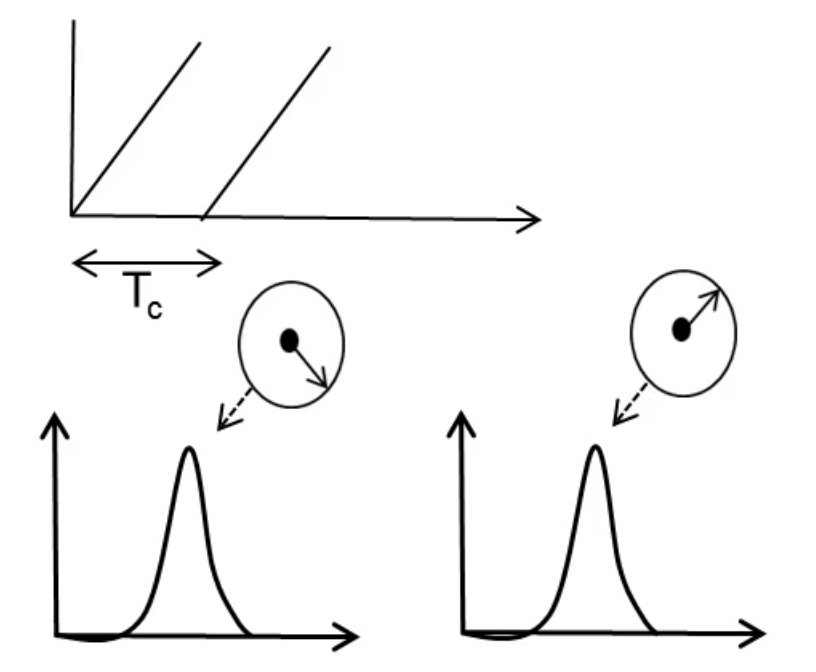
对于 FMCW 雷达,测量速度的基本思路如下:我们发射两个调频脉冲,两个脉冲之间的时间间隔为 \(T_c\)。每个脉冲对应的 Range-FFT 频谱中将有一个峰,峰值的位置相同,但相位不同。
相位差 \( \Delta \phi \) = \( \frac{4 \pi \Delta d}{\lambda} \)
其中,\( \Delta d \) 是物体在 \(T_c\) 时间间隔内的位移,\(\lambda\) 是雷达信号的波长。
如果物体的速度为 \(v\),那么物体在 \(T_c\) 时间内会移动 \( v \cdot T_c \) 的距离。通过测量两个脉冲之间的相位差,我们可以计算出物体的速度。
总结:通过测量两个连续脉冲的相位差,我们可以估算物体的速度。