FMCW 雷达的离散信号频率分辨率
在FMCW雷达中,我们通过离散傅里叶变换(FFT)将信号转换为频域,从而得到物体的距离信息。不同的频率分量通过FFT展现为频谱中的峰。
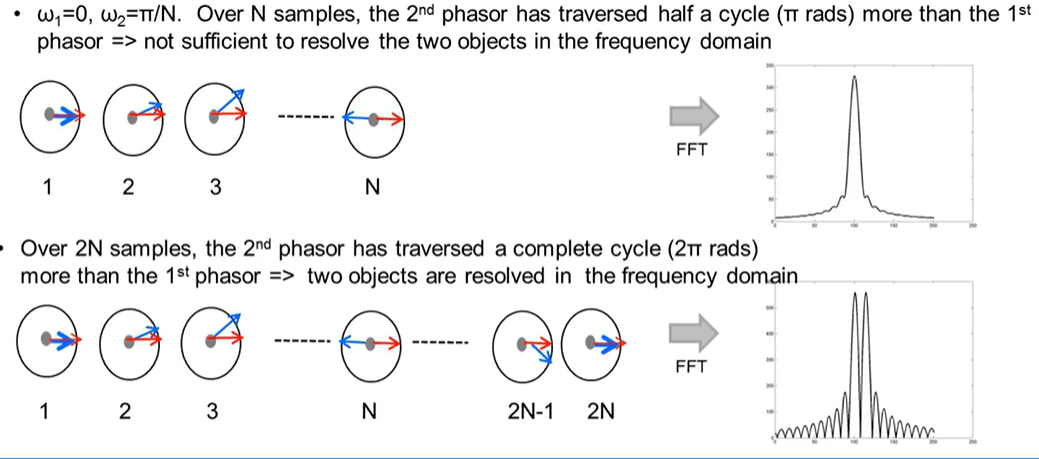
在该图中,我们看到了两个频率为 ω₁ 和 ω₂ 的旋转相量。假设ω₁ = 0, ω₂ = π/N,即在N个样本中,第二个相量比第一个相量多旋转了半个周期。
当样本数量从 N 增加到 2N 时,第二个相量比第一个相量旋转了完整的2π周期,两个频率在频域中被清晰区分。
连续与离散信号的分辨率比较
对于连续信号,两个频率之间的分辨率可以通过下列公式获得:
Δf = 1 / T
其中,Δf 为分辨率,T 为观察窗口的时间。
对于离散信号,两个离散频率之间的分辨率可以通过下列公式获得:
Δω = 2π / N
其中,Δω 为分辨率,N 为观察样本数。这个值也等同于:
Δfnorm = 1 / N
因此,连续信号的分辨率与观察时间 T 成反比,而离散信号的分辨率与观察样本数 N 成反比。
从这两个公式中可以看出,增加观察时间(即增加 T)或增加样本数(即增加 N)有助于提高频率分辨率,从而使雷达能够区分更接近的目标。
⚠️ 注意:单位差异
虽然两个公式形式上类似,但它们的单位并不相同,必须区分:
- 连续信号: Δf 的单位为 Hz(赫兹),表示每秒的频率间隔。
- 离散信号: Δω 的单位为 弧度/样本(rad/sample),这是角频率单位。
- 如果使用归一化频率(不带弧度),则分辨率可写为 Δfnorm = 1 / N,单位为 周期/样本(cycles/sample)。
因此,Δf = 1/T 和 Δω = 2π/N 在形式上相似,但它们所表示的物理意义和单位不同,不能直接进行数值比较。只有在知道采样率 fs 的情况下,才能将离散信号的分辨率换算成赫兹形式:
Δf = fs / N
这时,两者的关系就统一为:频率分辨率与观测时长(或样本数)成反比。
FMCW 雷达测速原理
现在我们已经掌握了理解 FMCW 雷达如何测量物体速度的基本原理。基本的思想如下:
- 你发送两个脉冲信号,它们之间的时间间隔为 Tc。
- 这两个脉冲信号的范围 FFT(快速傅里叶变换)会在同一位置有峰值,但相位不同。
- 测量两个峰值的相位差(ω),这个相位差将直接与物体的运动相关。
假设物体的速度为 v,那么物体在时间 Tc 内移动的距离为 vTc。
相位差与速度的关系
相位差 ω 与物体移动的距离之间的关系由以下公式给出:
Δφ = 4π × Δd / λ
其中,Δφ 是相位差,Δd 是物体在时间 Tc 内移动的距离,λ 是信号的波长。
通过调整公式,可以直接从测量的相位差估算物体的速度:
v = (Δφ × λ) / (4π × Tc)
关键点是,通过测量两个连续脉冲信号的相位差,我们可以估算出物体的速度。这种相位差的测量方法在 FMCW 雷达中用于获取动态目标的速度信息。
FMCW雷达最大速度测量
根据我们刚刚介绍的方法,通过测量相位差来估算物体的速度。然而,使用这种方法有一个限制:当相位差超过±180度(即±π弧度)时,测量结果会出现歧义。
最大速度测量的限制

图示中展示了当物体的速度较高时,如何影响相位的变化。假设有两个脉冲信号之间的相位差,如果物体的速度足够大,使得相位差超过180度,就会发生歧义。例如,图中所示,物体可能在逆时针方向移动了角度a,也可能在顺时针方向移动了角度b,但两者产生的相位差是相同的。
为了避免这种歧义,相位差需要在±π弧度内。即相位差的变化必须小于π,从而可以得出以下关于最大速度的公式:
v < λ / 4Tc
其中,v 为物体的速度,λ 为信号波长,Tc 为两个脉冲之间的时间间隔。也就是说,如果相位差大于180度(即超出了±π弧度范围),则无法明确判断物体的速度。
最大相对速度的计算公式是:
v_max = λ / 4Tc
因此,为了能够测量更高的最大速度,两个脉冲之间需要更短的时间间隔(更紧密地间隔)。
使用 Doppler FFT 测量多个目标的速度
在上一节中,我们已经学习了如何测量一个物体的速度。现在,我们将讨论如何测量多个物体的速度。如果多个物体位于雷达相同的距离处,但它们具有不同的速度,该如何处理呢?
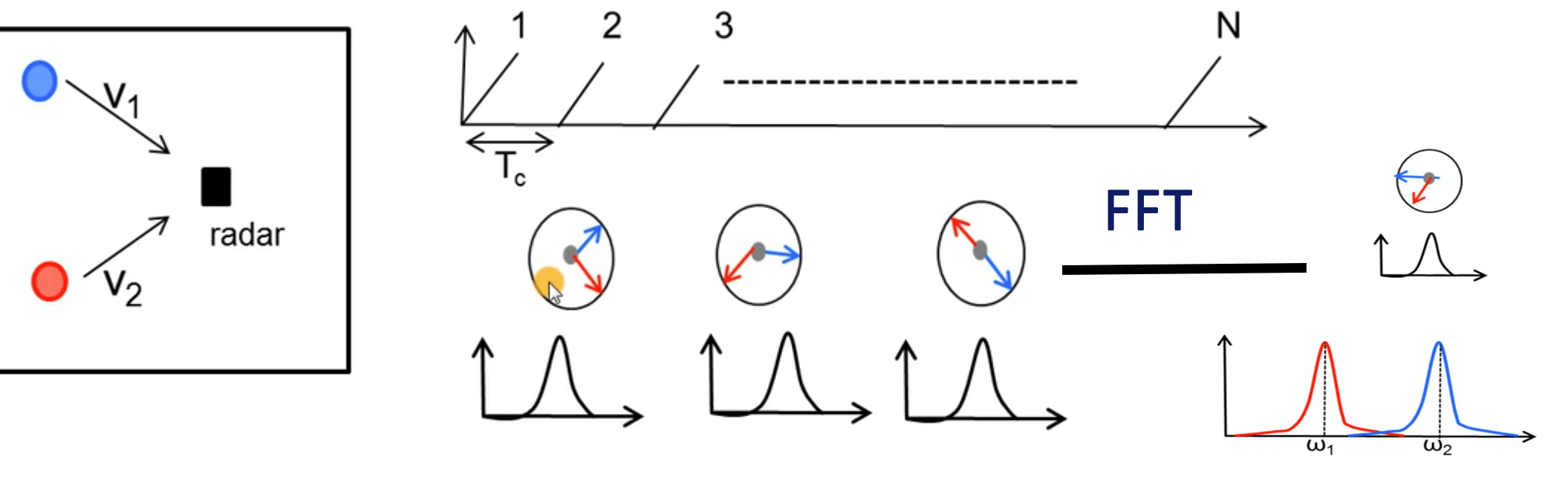
假设有两个物体位于雷达相同的距离处,但它们相对于雷达的速度分别为 V1 和 V2。这时,范围 FFT 将显示一个单一的峰值,表示这两个物体,但其相位包含了这两个物体的速度信息。
为了分辨这两个物体的速度,我们需要对两个连续的 chirp 信号进行离散傅里叶变换(FFT)。这时,经过 FFT 后会得到两个不同的频率峰值,分别对应这两个物体的速度。
通过这种方法,可以测量到不同物体的速度。这个 FFT 被称为 Doppler FFT。
Doppler FFT 的速度分辨率
Doppler FFT 能够分辨的最小速度差是多少呢?也就是 V1 和 V2 之间的最小速度差。
从前面可以知道,速度差 \(\Delta v\) 对应的角频率差 \(\Delta \omega\) 可以用如下公式表示:
Δω = (4πvTc) / λ
为了确保两个频率 \(\omega_1\) 和 \(\omega_2\) 能被分辨出来,要求它们的频率差 \(\Delta \omega > \frac{2π}{N}\),其中 N 是样本数量。
通过代入前述公式,我们可以推导出速度分辨率公式:
Δv > λ / (2NTc)
其中,\(N \cdot Tc\) 表示完整的时间帧。
因此,Doppler FFT 的速度分辨率与时间帧成反比,意味着增加时间帧长度会提高速度分辨率。同时,较小的速度差需要更短时间间隔的 chirp 来分辨。
叽里呱啦说啥呢,北京见😊😊😊
八嘎 ,怎么还不来